(第3篇)驾驶员状态监测预警集成到AI360全景影像系统的功能及应用场景
统一供电管理:共享宽压电源设计(8–36V DC),支持熄火低功耗模式,避免电瓶亏电。
共享网络通道:共用4G全网通模块,实现视频流、报警数据、行车信息同步上传。
(2)软件与数据层融合
多路视频输入整合:
支持4路AHD高清模拟摄像头(用于360环视)
支持1路CVBS或数字输入(用于DSM内视摄像头)
所有视频可在同一TFT-LCD显示屏上分屏/画中画显示
事件联动显示策略:当DSM检测到疲劳行为时,屏幕自动切换为双画面模式:左侧显示驾驶员面部特写,右侧显示当前外部环境影像(如倒车、转弯等场景),辅助判断风险等级。
(3)存储与安全保障
内置SD卡(最大支持256GB)同时存储:
外部全景视频(H.264/H.265编码,高压缩比)
内部驾驶员行为录像(加密存储,防篡改)
采用超级电容保护机制,防止突然断电导致数据丢失或SD卡损坏
文件管理系统具备坏道检测技术,延长存储寿命,保障连续记录。
二、集成系统的典型应用场景分析
本系统适用于对安全性要求极高的商用车辆运行场景,尤其在以下几类典型工况中展现出明显优势:
场景一:长途货运卡车夜间行驶
疲劳驾驶预警系统通常会在车辆速度处于一定范围内时(如10km/h到180km/h)进行监测和预警.江苏司机行为检测预警系统调查问卷
(第6篇)远测型驾驶员状态监测仪产品规格书
接口配置包含航空头视频输出接口(信号电压1.0Vp-p,输出阻抗75欧姆)、顶部扬声器音频输出接口(信号电压2.0Vp-p,输出电阻参数为4.7KΩ/1.0 KΩ)、1路UART串行接口(比特率20Kbps, +3~+15V为0,-3~-15V为1)、1路报警输出接口(信号电压4.7V)、4pin1.5mm GPS接口(1地线黑色、2 URX灰色、3 UTX紫色、4 +5V棕色)。
七、报警类型
远测型驾驶员状态监测仪支持测试模式和行车模式两种工作状态,测试模式用于安装调试,默认模拟车速80km/h;行车模式默认在车速>30km/h时触发报警,用户可根据需求调整告警激H速度,以下为具体报警类型:
1.疲劳驾驶预警:行车模式下,驾驶员低头、眯眼、闭眼持续3s以上,或打哈欠持续2s以上时触发;测试模式触发条件相同,两类模式下持续状态JIN报警1次,报警间隔为10秒/次,提示语为“请小心驾驶”。
2.打哈欠预警:行车及测试模式下,驾驶员张开嘴巴打哈欠持续2s以上时触发,持续状态JIN报警1次,报警间隔10秒/次,提示语为“请注意休息”。
3.粗心驾驶预警:行车及测试模式下,驾驶员向左或右方向偏头超过45°持续3s以上时触发,持续状态JIN报警1次,报警间隔10秒/次,提示语为“请注意路况”。
江苏司机行为检测预警系统调查问卷通过远程监控中心或云平台实时查看车辆的视频画面和疲劳状态信息,对驾驶员的驾驶行为进行远程监控和管理.

(第1篇)多模态主动安全解决方案-疲劳驾驶预警集成AI360全景影像系统的核X功能及应用场景
精拓智能独L算法的疲劳驾驶预警(DSM)系统集成到AI360全景影像系统,形成了多模态主动安全解决方案,其核X功能和应用场景如下:
一、核X功能
疲劳驾驶智能识别
►驾驶员状态监测精度非常高,疲劳驾驶行为、粗心驾驶行为预警准确率高达99%
►独C精细的面部特征锁定分析功能,实时检测眼睛状态变化,预判疲劳状态准确率达95%
►独特的图像识别系统,避免外界光源干扰检测效果,确保产品的预警功能全天候巡航监测
►独具CVBS视频输出功能,实时显示面部特征区域检测框,便于用户掌握产品监测状态
►用户可以根据驾驶习惯调整产品预警灵敏度和音量,提供1-3级可选,增强产品适应不同驾驶环境的能力
►独有的GPS车速检测功能,确保车辆在停止状态时关闭所有检测功能,避免干扰驾驶员正常驾驶
►丰富的外W设备联动接口,可连接方向盘振动器、座椅振动器进行多种预警,可连接AI360全景影像主机,MDVR进行后台远程监控管理。
驾驶员疲劳预警
实时持续监测驾驶员的面部状态、嘴巴和眼睛,监测疲劳状态特征
监测到驾驶员疲劳状态时发出预警声音,提醒驾驶员寻找安全的地点停车休息
(上篇)自带算法与不带算法的疲劳驾驶预警系统在功能和应用上存在明显的区别。以下是对这两者的详细比较:
一、功能区别自带算法的疲劳驾驶预警系统智能识别与判断:该系统能够运用智能算法,实时分析驾驶员的面部特征、眼部信号以及头部运动等生理状态,从而准确判断驾驶员是否处于疲劳状态。实时预警:一旦检测到驾驶员疲劳程度超标,系统会立即发出警报,提示驾驶者及时停车休息,有效避免潜在的安全风险。数据处理与决策本地化:所有数据处理和决策均在本地设备上完成,不依赖于外部网络,因此具有更高的实时性和稳定性。不带算法的疲劳驾驶预警系统基础监测:这类系统通常只能进行基础的驾驶员状态监测,如通过简单的传感器检测驾驶员的眼部活动或头部位置等,但缺乏智能算法的支持,因此无法进行深入的生理状态分析和疲劳程度判断。预警功能有限:由于缺乏智能算法,这类系统的预警功能可能相对简单,可能只能提供基本的警示信号,而无法提供详细的疲劳程度分析和个性化的预警建议。
二、应用区别应用场景自带算法的系统:更适用于需要长时间连续驾驶的场景,如长途货运、公共交通等,因为这些场景下驾驶员更容易出现疲劳状态。
当系统检测到驾驶员处于疲劳状态时,会立即通过方向盘振动器和座椅振动器向驾驶员发出预警信号.

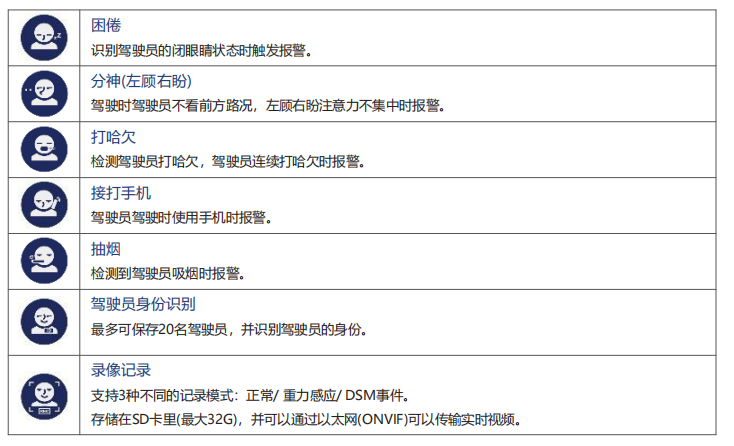
(第4篇)驾驶员状态监测仪的主要功能特征及应用场景
总结
车侣驾驶员状态监测仪通过生物特征识别+多传感器融合技术,构建了覆盖疲劳、分心、违规行为的立体监测体系。
其应用核X在于:
商用车主动安全:降低因人为失误引发的交通事故率;
车队管理数字化:为运营者提供驾驶行为量化分析工具;
场景自适应能力:车速联动、灵敏度调节、抗光干扰等功能确保全场景鲁棒性。
此外,疲劳驾驶预警可集成到AI360全景影像系统中,两者通过统一的车载智能终端平台进行数据融合与联动控制,形成“人—车—环境”三位一体的安全闭环管理体系。通过4G全网通模块,实现视频流、报警数据、行车信息同步上传。
视频输出是疲劳驾驶预警系统的一种重要功能,用于显示驾驶员的实时视频画面,预警信息或系统状态等.江苏司机行为检测预警系统调查问卷
MDVR采用高效的视频压缩算法,确保视频数据存储和传输的效率,结合图像和传感器数据,提高疲劳检测的准确性.江苏司机行为检测预警系统调查问卷
(第3篇)驾驶员状态监测仪的主要功能特征及应用场景
保险风控辅助:
记录驾驶行为数据,为UBI(Usage-BasedInsurance)保险模型提供驾驶风险评级依据。
3.特殊场景适配
夜间驾驶:
红外补光确保暗光环境监测精度,解决传统摄像头夜间失效问题。
强光环境作业:
抗光源干扰设计适用于沙漠、雪地等高反射率区域工程车辆。
三、安装与适配规范
安装位置:需安装在驾驶员正前方无遮挡区域,水平偏移应小于10厘米,垂直距离在65至125厘米之间(比较大为180厘米)。
调试流程:首先进行支架固定,接着通过CVBS输出校准进行角度调整,Z后在通电后5秒内完成面部识别,此时绿灯会亮起以确认状态正常。
环境限制:强光源可能对识别产生影响,因此需避免强光直射镜头;若镜头被持续遮挡达到或超过10秒,设备将触发“请勿遮挡”警报。
四、技术参数摘要
图像处理:1/3"CMOS传感器,PAL/NTSC双制式(25~30帧/秒)。
功耗:DC12V,待机≤4W。
结构:尺寸75×118.5×66mm,重量420g(紧凑型设计节省空间)。
报警延迟:行车模式下同类行为10秒内不重复报警,减少干扰。
江苏司机行为检测预警系统调查问卷