(上篇)透明360全景影像系统在挖掘机上的应用,通过多摄像头合成与透SHI算法,为驾驶员提供无盲区视野,其技术实现与优势可拆解如下:
一、系统核XIN原理多摄像头阵列布局:在挖掘机车身关键位置(如前格栅、后臂、侧门、车顶)安装4-6个超广角摄像头,覆盖360°环境。抗环境设计:采用IP69K防水、防抖摄像头,适应工地尘土、振动、冲击等恶劣条件。实时图像拼接通过边缘计算单元将多路视频流合成全景鸟瞰图,结合SLAM算法动态校准车身姿态(如动臂角度变化),消除机械结构遮挡。透SHI投影技术将合成图像通过“虚拟透明”算法映射到驾驶舱显示屏,使驾驶员仿佛透过车身直接观察周围环境,解决传统后视镜盲区问题。
二、关键功能实现动态盲区补偿当动臂或铲斗遮挡视线时,系统自动增强对应区域摄像头的分辨率,并通过AR叠加警示框提示障碍物距离。智能辅助线在全景画面中生成动态辅助线(如挖掘轨迹预测、安全距离提示),辅助驾驶员精细操作。夜间增强模式配备红外摄像头与热成像模块,在低光照条件下自动切换,确保全天候可视性。
三、安装与集成要点硬件部署摄像头位置:需避开液压油管、铰接点等高频振动区域,优先安装于刚性支架。 主动安全一体机4G网络版,360全景影像+BSD盲区预警,实现后台远程实时监控管理.-广州精拓电子科技有限公司.车外多路360全景影像厂家直销
(第1篇)AI360全景影像系统双光融合定制解决方案
一、产品功能介绍(按模块分类)
AI360全景双光融合定制设备是一款集热成像视觉、可见光AI视觉、车联网技术于一体的智能车载安全监控系统,专为商用车辆在复杂环境下的行车安全设计。其核X功能涵盖多模态感知、智能预警、远程运维和高精度定位等,全M满足现代智能交通对安全性、智能化与可扩展性的需求。
热成像多光谱AI视觉安全监控系统采用高性能的图像处理芯片,它的NPU算力为0.8T, 并基于LINUX操作系统开发,符合国标808/1078等协议标准,能实时跟踪故障情况,支持远程参数查询、设置等智能运维功能,集卫星定位、热成像与可见光视频监控、AI智能算法和车辆网技术应用为一体的高性价可适应弱光、强光等恶劣场景的视觉智能终端系统。
1. 可见光AI视觉功能
可见光AI视觉功能:包含人脸识别、ADAS预警、DMS驾驶员监控、BSD行人/车辆盲区检测和360°AVM全景,对车辆周边环境和盲区进行覆盖。BSD预警系统的行人检测视觉算法,当车辆周边报警区有行人、障碍物时,主动进行语音报警提醒;设备支持6路摄像头输入;⽀持IO信号/以太网/RS485/RS232/USB/CAN通讯接口,可接外设雷达障碍物检测,可针对不同客户的不同需求不断优化升级。
车辆改装多路360拼接算法AI360全景影像集成系统定制方案理念:硬件模块化+协议标准化+云端协同化.

(上篇)车侣AI360全景影像系统凭借其强大的功能特性和灵活的定制能力,能够满足不同客户在多样化应用场景下的需求。以下是对该系统核XIN功能及定制化服务的详细解析:
核XIN功能亮点
1.视频处理与传输多路视频输入与拼接:支持8路AHD视频输入,可实现4-6路环视拼接,形成360°全景视图,消除视觉盲区。实时视频流输出:通过网口输出RTSP视频流,兼容主流视频监控平台,便于远程查看与集成。
2.智能安全监测BSD盲区监测:4路BSD盲区监测预警功能,实时检测车辆周边障碍物,提升行车安全性。AI算法赋能:内置AI视觉算法,可识别行人、车辆等目标,辅助驾驶员决策。
3.通信与定位4G全网通:支持4G通讯,实现数据远程传输与云端管理。高精度定位:集成GPS模块,提供实时定位信息,适用于车队管理、物流跟踪等场景。
4.外设扩展能力多协议接口:配备RS232串口、CAN接口、TTL串口等,支持与OBD、雷达、摄像头等外设无缝对接。开放API:提供丰富的软件开发工具包(SDK),便于客户进行二次开发与系统集成。
定制化服务优势
1.场景化需求匹配工业车辆:针对叉车、AGV等工业设备,定制防震、耐高温方案,优化盲区监测与路径规划。特种车辆:为消防车、救护车等定制紧急模式,
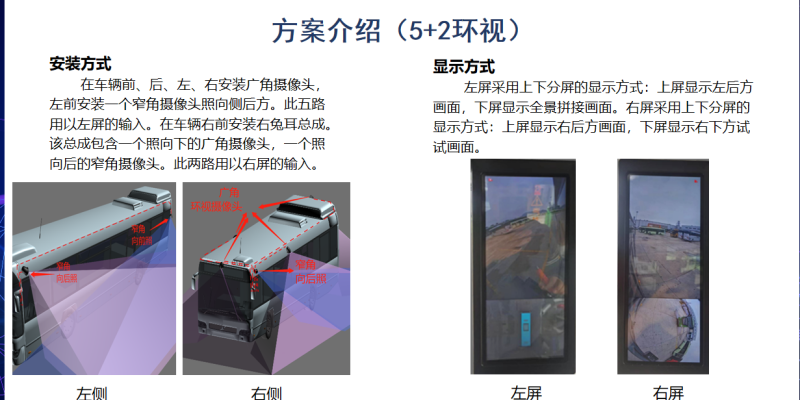
(第1篇)非对称全景拼接方案的架构特征及其在船舶领域的应用价值
一、非对称全景拼接方案的架构特征
1.硬件架构特征
1.1差异化镜头布局设计
非对称摄像头配置:多镜头模组支持多路传感器灵活配置,采用"船头5路高密度+船尾2路特写"的差异化布局策略,实现船首盲区<2米、船周Z大盲区<1米的无死角覆盖;
船头/船尾关键区域:采用高密度部署,T5全景拼接主机,采用超广角镜头(水平视场角≥88°),搭配F1.0D光圈增强低光环境细节捕捉,解决靠泊时码头设施、小型船只的近距离监控难题。确保近距离无死角监控;
甲板/舷侧过渡区域:使用多目全景拼接摄像机,通过稀疏布局覆盖远端区域,避免桅杆、吊臂等设备遮挡导致的画面断裂;
镜头参数优化:超广角镜头(水平视场角≥88°)覆盖更广区域F1.0D光圈设计增强低光环境细节捕捉能力多目全景拼接摄像机:解决桅杆、吊臂等设备导致的画面断裂问题。
1.2多目芯片内拼技术
ASIC专Y芯片集成:采用国内自主研发的多路视觉拼接ASIC芯片
低延迟处理:实现多路图像一次拼接成像,减少90%传输带宽占用
单路视频传输:合并为单路视频传输,简化系统架构
动态场景适应:配合T5全景系统的拼接视频输入,确保人员/物体移动时的连续画面
360全景影像透S功能在挖掘机上的应用,全方W无死角,精确定W,实时监控与预警.-广州精拓电子科技有限公司.

(第4篇)非对称全景拼接方案的架构特征及其在船舶领域的应用价值
某铁矿船队应用案例显示,该方案使靠泊效率提升15%,碰撞事故率下降60%。
二、非对称全景拼接方案在船舶领域的应用效果
1.监控覆盖效果提升
1.1盲区消除
船首盲区控制:将船首盲区缩小至<2米船
周盲区优化:Z大盲区<1米,实现接近无死角覆盖
特写监控能力:船尾特写摄像头解决码头设施、小型船只的近距离监控难题
1.2动态场景适应
船舶颠簸补偿:在6级海况下保持画面稳定
移动物体跟踪:确保航行中动态障碍物(如漂浮物、渔船)无拖影或分割错误
2.航行安全增强
2.1智能预警系统
障碍物识别分类:准确识别行船、浮标、渔网等不同类型障碍物
碰撞风险计算:支持DCPA(ZUI近会遇距离)/TCPA(ZUI近会遇时间)动态计算
高准确率预警:碰撞风险预警准确率达92%
2.2靠泊辅助
距离精Z显示:实时显示船舶与码头的相对距离(精度±0.5m)
环视警戒线:提供离靠泊环视警戒线标识
特写聚焦:船头密集摄像头专门聚焦缆桩、护舷等关键部位
3.操作效率提升
3.1视觉辅助决策
双模式切换:根据场景需求在真实视野和俯视全景模式间智能切换
信息叠加显示:在画面上叠加关键导航和安全信息
透S感保留:在需要深度判断的场景保留原始透S感
车侣360全景影像与的工作原理。车外360影像系统厂家
通过360全景与DSM司机行为监测的深度融合,系统实现了“车周环境可见化”与“驾驶状态透明化”的双重目标.车外多路360全景影像厂家直销
(第2篇)精拓智能4G-AI360全景影像系统对接云平台管理指南
3.登录参数设置·必填项:登录账号、密码及带红五星的参数(如终端编码),建议手机号、车架号统一使用11位编码(便于管理)。
4.验证连接状态·网络查询:进入“系统→网络状态”,显示“PING通云台IP”代BIAO通信正常(如图6)。·定位确认:状态栏显示卫星数量≥9颗时,平台地图实时更新位置;<9颗时显示初始测试地址。
三、云平台设置:在电脑上“添加设备”目标:在云平台注册设备,完成视频参数配置并验证对接。
1.登录云平台·使用厂商提供的测试账号密码登录云平台网页(如“精拓车侣云”)。
2.新增车辆信息·进入**“管理中心→车辆管理→新增”**,填写车牌号、终端标识(必须与设备11位编码一致),带红五星项为必填。
3.配置视频参数·基础设置:视频类型选“部标”,通道数按摄像头数量填写(如4路/8路),音频编码选“G771U”。·保存后刷新:左侧“监控中心”出现车辆编号,说明设备已录入平台。
车外多路360全景影像厂家直销