- 品牌
- 天盛德隆科技,守护神装备
- 型号
- EUDEMON
车道保持辅助(LKA)通过前视摄像头识别车道线,借助电动助力转向系统微调方向盘,实现车辆在车道内的居中行驶,大幅降低无意识车道偏离风险。其技术在于动态转向比算法,如智己 L6 的线控数字底盘可实现 8:1 至 18:1 的无级传动比切换,响应速度较传统 CAN 总线架构提升两个数量级。在高速场景中,LKA 能有效应对轻微弯道与车道偏移,配合交通标志识别(TSR)功能,可自动匹配限速标准调整车速。需注意的是,LKA 仍依赖清晰车道线标识,在无标线道路或施工路段需驾驶员及时接管,避免系统功能受限导致风险。ADAS设备不只提供了驾驶辅助,具备了一定的娱乐功能,让驾驶更加愉悦。云南ADAS驾驶辅助设备如何使用
智能灯光控制系统是 ADAS 中容易被忽视却至关重要的部分。除了自适应远光灯,自动头灯能根据外界光线强度自动开关,进入隧道、地下车库时无需手动操作;随动转向大灯则可根据方向盘转动角度调整照明方向,在弯道行驶时提前照亮弯心区域,让驾驶员更早发现路边行人或障碍物。这些细节功能虽不显眼,却在潜移默化中提升了不同场景下的驾驶安全性。对于大型车辆而言,ADAS 驾驶辅助设备的作用更为突出。货运卡车和客车因车身庞大、盲区多,传统驾驶方式难度大,而车道偏离抑制系统能通过微调方向盘防止车辆跑偏,前向碰撞缓解系统可在与前车距离过近时主动减速,减少重特大事故发生。盲区监测系统配合车身侧面雷达,能覆盖更大范围的盲区,在转弯、并线时为驾驶员提供路况信息,保障大型车辆的道路行驶安全。苏州ADAS驾驶辅助设备市场报价ADAS驾驶辅助设备的智能巡航功能,让行车更加平稳。
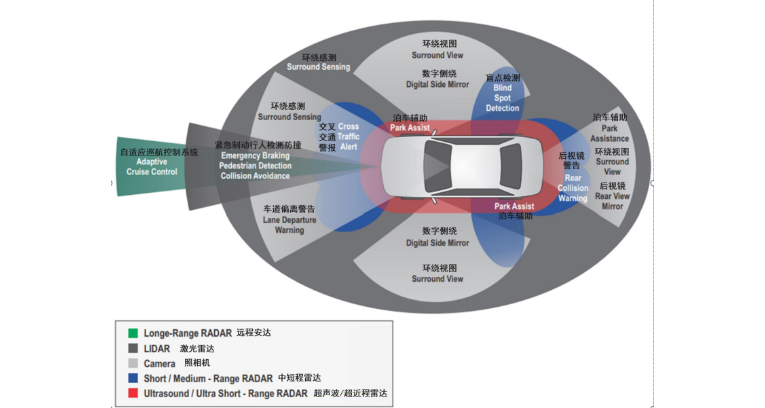
ADAS 驾驶辅助设备依托 “感知 - 决策 - 执行” 的技术架构,实现对驾驶环境的精细识别与智能响应。感知层通过高清摄像头、毫米波雷达、激光雷达等多元传感器,采集道路标线、车辆、行人、障碍物等环境信息,其中摄像头擅长识别图像特征(如车道线、交通信号灯),雷达则精细测量距离与速度,两者融合可弥补单一传感器的局限性,提升复杂环境下的识别精度。决策层基于人工智能算法,对感知数据进行实时分析,判断驾驶场景(如拥堵、高速)、识别潜在风险(如碰撞、偏离),并制定比较好辅助策略(如制动、转向调整)。执行层通过控制车辆的动力系统、转向系统、制动系统,将决策指令转化为实际操作,实现辅助功能的落地。整个过程以毫秒级速度完成,确保辅助响应的及时性与准确性,为驾驶安全筑牢技术根基。
长途驾驶中,驾驶员的注意力分散和疲劳是重大安全隐患,ADAS 的驾驶员监测系统有效解决了这一问题。该系统通过摄像头捕捉驾驶员的面部特征,当检测到闭眼、低头看手机等注意力不集中的状态时,会立即发出声音警报,部分车型还会通过震动座椅或方向盘加强提醒。若监测到驾驶员持续疲劳状态,系统会建议停车休息,并可自动搜索附近的服务区,为长途出行的安全增添多重保障。面对突发状况,ADAS 的主动安全功能能降低事故损失。例如,车身稳定控制系统在车辆急转弯或湿滑路面行驶时,通过单独制动个别车轮调整车身姿态,防止侧滑、甩尾;坡道辅助系统则在坡道起步时短暂保持制动,避免车辆后溜,尤其在地下车库出库、山路坡道等场景中实用。这些功能在驾驶员来不及反应的瞬间快速介入,将事故消灭在萌芽状态,或减轻事故造成的伤害。这款ADAS设备具有高度的集成性,易于安装和使用。

ADAS驾驶辅助设备通过利用多种传感器和先进的算法来区分静态和动态物体。这些传感器包括毫米波雷达、激光雷达、摄像头等,它们能够实时感知周围环境并收集数据。在区分静态和动态物体时,ADAS设备主要依靠物体在环境中的运动状态和变化特征。静态物体指的是那些位置相对固定的物体,如道路标志、路灯、树木等。这些物体在传感器获取的数据中通常表现为相对稳定的图像或信号特征。相比之下,动态物体则是指那些位置或状态在不断变化的物体,如车辆、行人、自行车等。这些物体在传感器获取的数据中会呈现出明显的运动轨迹或速度变化。后方横向车辆制动辅助在车辆倒车遇到后方横向车辆接近时,自动实施制动。甘肃ADAS驾驶辅助设备
环视泊车辅助系统通过多个摄像头采集车辆四周图像,以虚拟俯视图形式展示,方便驾驶者泊车。云南ADAS驾驶辅助设备如何使用
ADAS 的运行依赖多硬件协同与软件算法的精细配合,其技术架构正日趋成熟。硬件层面,摄像头负责识别交通信号灯、车道线、行人等视觉信息,毫米波雷达擅长探测车辆距离与速度,激光雷达则提供高精度三维环境数据,三者互补形成 “无死角” 感知;软件层面,AI 算法通过海量数据训练,不断优化环境识别精度与决策响应速度,让系统在复杂路况下也能快速做出合理判断。这种 “硬件 + 软件” 的深度融合,让 ADAS 的可靠性持续提升,成为驾驶员信赖的 “出行伙伴”云南ADAS驾驶辅助设备如何使用
- 山西ADAS驾驶辅助设备介绍 2026-02-14
- ADAS驾驶辅助设备报价 2026-02-13
- 新疆ADAS驾驶辅助设备解决方案 2026-02-12
- 贵州ADAS驾驶辅助设备促销价格 2026-02-12
- 常州ADAS驾驶辅助设备用途 2026-02-12
- 北京ADAS驾驶辅助设备使用流程 2026-02-12
- ADAS驾驶辅助设备技术方案 2026-02-12
- 上海ADAS驾驶辅助设备排行榜 2026-01-14
- 苏州ADAS驾驶辅助设备怎么用 2026-01-13
- 河北ADAS驾驶辅助设备干什么用的 2026-01-11
- 广西ADAS驾驶辅助设备哪家好 2026-01-10
- 深圳ADAS驾驶辅助设备功能 2026-01-10