(中篇)在疲劳驾驶集成MDVR系统中,TTS喇叭和对讲手柄是怎样通过智慧云平台下发指令对车端进行交互控制,监控实时作业情况?
二、指令下发与交互控制流程
1.用户请求生成:用户通过移动应用或网页界面向智慧云平台发出请求,例如要求监控某辆车的实时作业情况或向驾驶员下发语音指令。
2.云平台接收并处理请求:云平台接收到用户请求后,进行解析和处理。根据请求内容,云平台生成相应的控制指令,并通过选定的通信协议(如HTTP、MQTT等)将指令发送给MDVR系统。
3.MDVR系统接收指令:MDVR系统接收到来自云平台的指令后,进行解析并根据指令内容执行相应的操作。例如,如果指令是要求监控实时作业情况,MDVR系统将启动视频采集和传输功能;如果指令是要求向驾驶员下发语音指令,MDVR系统则将指令发送给TTS喇叭。
4.TTS喇叭合成语音并播放:TTS喇叭接收到来自MDVR系统的文本指令后,将其合成为语音信号并播放出来。这样,驾驶员就能听到来自云平台的语音指令,并根据指令执行相应的操作。
5.对讲手柄进行语音通信:在需要时,驾驶员可以通过对讲手柄与云平台或其他车辆进行语音通信。这有助于实时交流信息、协调作业或处理紧急情况。 自带算法的疲劳驾驶预警系统通过其独特的图像识别技术和强大的抗干扰能力,实现了全天候巡航监测功能.物流车疲劳驾驶预警系统开发平台
(下篇)DSM-7疲劳驾驶预警系统的安装位置推荐主要基于其图像采集模块需要时时刻刻监测到驾驶员面部的需求。以下是具体的安装位置推荐:
二、安装注意事项确保清晰度:无论选择哪个位置安装,都需要确保摄像头能够清晰地捕捉到驾驶员的面部特征,以便系统能够准确识别驾驶员的疲劳状态。避免干扰:安装位置应尽可能避免干扰驾驶员的视线和操作,以确保驾驶安全。易于维护:安装位置应便于日常维护和检查,以确保系统的正常运行。符合规定:在安装过程中,应遵守相关法律法规和车辆制造商的规定,以确保安装的合法性和安全性。综上所述,疲劳驾驶预警系统的安装位置推荐主要集中在车辆内部驾驶员视线范围内的位置,如中控台、仪表盘、左侧A柱、转向柱后壳体和顶棚组合开关等。在安装过程中,需要注意确保清晰度、避免干扰、易于维护和符合规定等方面的问题。 物流车疲劳驾驶预警系统开发平台当系统检测到驾驶员处于疲劳状态时,会立即通过方向盘振动器和座椅振动器向驾驶员发出预警信号.

(下篇)疲劳驾驶预警设备在商用车上的推荐安装位置需要满足能够时时刻刻监测到驾驶员面部的条件,以确保设备能够有效地捕捉到驾驶员的疲劳状态。以下是一些推荐的安装位置:
在安装疲劳驾驶预警设备时,还需要注意以下几点:安装角度:设备应安装在驾驶员正前偏右30°范围内,且角度越小越好,以确保设备能够准确地捕捉驾驶员的面部特征。安装距离:设备与驾驶员面部的距离应保持在60cm~120cm之间,建议安装在80cm左右的位置,以确保设备能够清晰地捕捉到驾驶员的面部图像。避免遮挡:设备应安装在不会遮挡驾驶员视线或干扰驾驶员操作的位置,以确保驾驶员的行车安全。稳固性:设备应牢固地安装在车辆上,以避免在行驶过程中松动或移位,影响设备的正常使用。
综上所述,疲劳驾驶预警设备在商用车上的推荐安装位置应满足能够时时刻刻监测到驾驶员面部的条件,并考虑设备的安装角度、距离、稳固性以及避免遮挡等因素。具体安装位置可能因车型和设备的不同而有所差异,建议根据车辆实际情况和设备说明书进行安装。
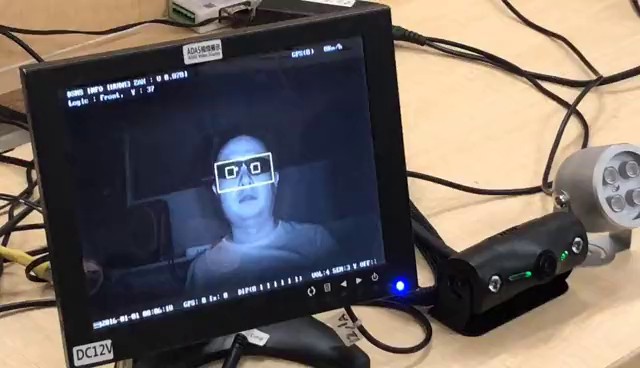
(第5篇)车侣独L算法的疲劳驾驶预警设备功能简捷实用,预警实时准确,操作简单易用,外形美观灵巧,驾驶员状态监测精度非常高,疲劳驾驶行为、粗心驾驶行为预警准确率高达99%,独C精细的面部特征锁定分析功能,实时检测眼睛状态变化,预判疲劳状态准确率达95%,独特的图像识别系统,避免外界光源干扰检测效果,确保产品的预警功能全天候巡航监测,独具CVBS视频输出功能,实时显示面部特征区域检测框,便于用户掌握产品监测状态,用户可以根据驾驶习惯调整产品预警灵敏度和音量,提供1-3级可选,增强产品适应不同驾驶环境的能力,独有的GPS车速检测功能,确保车辆在停止状态时关闭所有检测功能,丰富的外W设备联动接口,可连接方向盘振动器、座椅振动器进行多种预警,可连接MDVR平台进行管理。以下是对其功能的详细阐述:
提供1-3级可选,增强了产品适应不同驾驶环境的能力。
9,GPS车速检测功能:设备内置GPS模块,能够实时监测车速,并在车辆停止时自动关闭所有检测功能,避免对驾驶员正常驾驶造成干扰。
10,丰富的外W设备联动接口:设备支持连接方向盘振动器、座椅振动器等多种预警设备,提供多种预警方式,同时可连接MDVR平台进行管理,方便用户进行远程监控和数据分析。 疲劳驾驶预警利用计算机视觉,OpenCV库Haar特征分类器,级联分类器或深度学习算法,对驾驶员面部实时检测预警.

(篇一)DSM-7疲劳驾驶预警系统是一种重要的汽车安全辅助系统,它通过监测驾驶员的生理反应和驾驶行为来判断驾驶员是否处于疲劳状态,并及时发出预警,以减少因疲劳驾驶引发的交通事故。PCI盒子作为疲劳驾驶预警系统的一部分,通常用于连接外WEI设备和主机,实现数据的采集、处理和传输。以下是对PCI盒子外WEI设备连接主机、振动器、CAN线、视频输出和232串口线的详细阐述:
1. 连接主机功能:PCI盒子通过特定的接口(如PCIe插槽)与主机相连,实现数据的传输和指令的接收。主机是疲劳驾驶预警系统的核XIN处理单元,负责运行算法、分析数据并发出预警。连接方式:通常,PCI盒子会插入主机的PCIe插槽中,通过插槽提供的电力和数据通道与主机进行通信。
2. 连接振动器功能:振动器是疲劳驾驶预警系统的一种输出设备,用于在检测到驾驶员疲劳时发出物理振动提醒。这种提醒方式可以直接作用于驾驶员的身体,引起其注意并促使其采取行动。连接方式:振动器通常通过电线或无线方式连接到PCI盒子或系统的其他控制单元上。当系统检测到驾驶员疲劳时,会向振动器发送信号,使其产生振动。
DSM-7疲劳驾驶预警系统主机是疲劳驾驶预警系统的核XIN处理单元,负责运行算法,分析数据并发出预警.物流车疲劳驾驶预警系统开发平台
疲劳驾驶预警系统基于图像智能识别分析技术,实时检测驾驶员的头部及眼皮运动,凝视方向,打哈欠等状态.物流车疲劳驾驶预警系统开发平台
(上篇)自带算法与不带算法的疲劳驾驶预警系统在功能和应用上存在明显的区别。以下是对这两者的详细比较:
一、功能区别自带算法的疲劳驾驶预警系统智能识别与判断:该系统能够运用智能算法,实时分析驾驶员的面部特征、眼部信号以及头部运动等生理状态,从而准确判断驾驶员是否处于疲劳状态。实时预警:一旦检测到驾驶员疲劳程度超标,系统会立即发出警报,提示驾驶者及时停车休息,有效避免潜在的安全风险。数据处理与决策本地化:所有数据处理和决策均在本地设备上完成,不依赖于外部网络,因此具有更高的实时性和稳定性。不带算法的疲劳驾驶预警系统基础监测:这类系统通常只能进行基础的驾驶员状态监测,如通过简单的传感器检测驾驶员的眼部活动或头部位置等,但缺乏智能算法的支持,因此无法进行深入的生理状态分析和疲劳程度判断。预警功能有限:由于缺乏智能算法,这类系统的预警功能可能相对简单,可能只能提供基本的警示信号,而无法提供详细的疲劳程度分析和个性化的预警建议。
二、应用区别应用场景自带算法的系统:更适用于需要长时间连续驾驶的场景,如长途货运、公共交通等,因为这些场景下驾驶员更容易出现疲劳状态。
物流车疲劳驾驶预警系统开发平台