(中篇)自带算法且具备视频同步输出功能的疲劳驾驶预警设备是一种集成了先进技术与智能算法的安全辅助设备,以下是对其的具体阐述:
同时,设备还可以将预警信息发送到后台系统,以便相关人员及时采取措施进行干预。
三、技术原理传感器采集:设备利用摄像头、红外线传感器等硬件设备,实时收集驾驶员的生理数据和周围环境信息。数据预处理:对采集到的数据进行去噪、滤波等预处理操作,以保证数据的可靠和准确。算法分析:通过图像识别、模式识别等算法对处理后的数据进行分析,判断驾驶员是否处于疲劳状态。这包括对驾驶员自身特征的检测(如生理指标、生理反应)以及结合车辆行驶状态的综合判断(如转向频率、刹车频率、行驶速度等)。预警策略:根据分析结果,设备会采取相应的预警策略,如发出声音或视觉信号提醒驾驶员。
疲劳驾驶预警利用计算机视觉,OpenCV库Haar特征分类器,级联分类器或深度学习算法,对驾驶员面部实时检测预警.中国澳门车辆司机行为检测预警系统
(下篇)在疲劳驾驶集成MDVR系统中,TTS喇叭和对讲手柄是怎样通过智慧云平台下发指令对车端进行交互控制,监控实时作业情况?
三、监控实时作业情况
1.视频采集与传输:MDVR系统持续采集车内外视频数据,并通过无线网络将其传输给智慧云平台。云平台接收到视频数据后,进行存储、分析和展示,以便用户能够实时监控车辆的作业情况。
2.状态反馈与报警:MDVR系统还负责监测车辆的状态信息(如车速、发动机状态等)以及驾驶员的行为(如疲劳驾驶检测)。一旦发现异常情况或违规行为,MDVR系统将立即向云平台发送报警信息。云平台接收到报警信息后,可以实时通知用户或采取其他措施进行处理。
综上所述,在疲劳驾驶集成MDVR系统中,TTS喇叭和对讲手柄通过智慧云平台下发指令对车端进行交互控制,并监控实时作业情况的过程涉及多个技术环节和设备的协同工作。这些设备和技术共同构成了一个高效、智能的监控系统,为交通安全和作业效率提供了有力保障。 广西疲劳驾驶预警系统推荐厂家疲劳状态的判断基于驾驶员的面部特征(眨眼频率,闭眼时间,头部运动),眼部信号,体态特征及车辆行驶状态信息.

(第1篇)广州精拓智能的驾驶员状态监测仪是一款集成了独L算法的智能设备,具备高度精细的驾驶员状态监测能力。以下将从功能特点、安装应用注意事项以及七大预警方式的报警机制三个维度进行详细解析。
一、功能特点
1.高精度状态监测
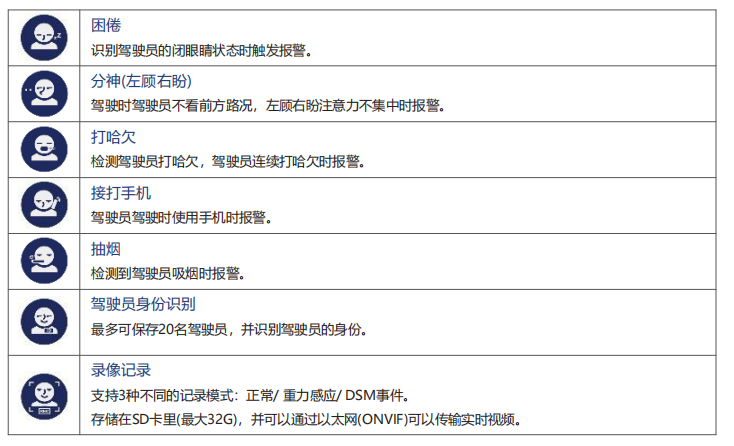
-疲劳驾驶识别:通过面部特征锁定技术,实时检测驾驶员闭眼、低头、打哈欠等行为,疲劳驾驶行为识别准确率高达99%。
-面部状态分析:采用独CHUANG的面部特征锁定分析功能,对眼睛状态变化进行实时检测,预判疲劳状态准确率达95%。
-抗干扰能力强:独特的图像识别系统可有效避免外界光源干扰,确保全天候监测稳定性。
2.多模态预警系统
-音频预警:提供多种不同频率和节奏的提示音,区分不同类型的危险行为。
-灯光提示:通过绿灯(正常)、红灯(危险)、蓝灯(侧偏预警)进行状态指示。
-联动接口:支持连接方向盘振动器、座椅振动器等设备,实现多感官预警。
3.智能自适应调节
-灵敏度调节:用户可根据驾驶习惯设置预警灵敏度(1-3级)。
-音量调节:音频提示音量也可调节,适应不同驾驶环境。
-GPS车速检测:车辆停止时自动关闭检测功能,避免误触发。
4.视频输出与调试辅助
-支持CVBS视频输出,实时显示面部特征区域检测框,便于调试和角度调整。
(下篇)自带算法的疲劳驾驶预警系统中,GPS的功能并不仅限于获得车速信息,但确实在这一方面发挥着重要作用。以下是对GPS在疲劳驾驶预警系统中获得车速信息功能的详细阐述:
例如,当GPS检测到车速异常时,系统可以结合方向盘的转向频率和幅度等信息来判断驾驶员是否处于疲劳状态。三、GPS车速信息的准确性与局限性虽然GPS在获取车速信息方面具有一定的优势,但也存在一些局限性。例如,当车辆行驶在复杂环境(如隧道、城市峡谷等)中时,GPS信号可能会受到干扰或遮挡,导致车速信息不准确。此外,由于GPS是基于位置变化来计算车速的,因此在短时间内(如几秒钟内)的车速变化可能无法被准确捕捉。为了提高GPS车速信息的准确性,可以采取一些措施,如使用更高精度的GPS接收器、优化算法以减少信号干扰的影响等。同时,也可以结合其他传感器(如雷达、激光雷达等)来提供更准确的车速信息。
综上所述,GPS在自带算法的疲劳驾驶预警系统中扮演着重要角色,它不仅能够提供车速信息以帮助系统判断驾驶员的疲劳程度,还能够记录行驶轨迹并为事故调查提供线索。然而,也需要注意到GPS在获取车速信息方面存在的局限性和挑战,并采取相应的措施来提高其准确性。 疲劳驾驶预警系统能将监测到的驾驶员疲劳状态,车辆行驶数据等信息实时传输至MDVR平台,进行分析和管理.

(中篇)车载自带算法的疲劳驾驶预警集成MDVR实现云台管理的原理
2.3云台控制-自动追踪:-通过疲劳检测算法分析驾驶员头部位置,动态调整云台角度,确保摄像头始终对准驾驶员面部。-使用人脸识别和头部姿态估计技术,实现精细追踪。-远程控制:-通过云平台或用户终端,管理员可以手动调整云台角度,优化监控范围。
2.4MDVR集成-视频录制与存储:-MDVR实时录制车内视频,并将视频数据存储到本地或上传至云平台。-支持循环录制,确保存储空间高效利用。-数据同步:-将疲劳检测结果与视频数据同步,便于后续查看和分析。-事件触发录制:-当检测到疲劳驾驶或其他异常事件时,MDVR自动标记并保存相关视频片段。
2.5数据传输与云平台管理-数据传输:-通过4G/5G网络将视频数据、疲劳检测结果和传感器数据上传至云平台。-远程管理:-管理员可以通过云平台查看实时视频、调整云台角度、下载历史数据。-预警通知:-当检测到疲劳驾驶时,系统通过云平台向管理员或驾驶员发送预警通知。
3.关键技术-计算机视觉:用于驾驶员面部特征提取和疲劳状态识别。-云台控制算法:实现摄像头的自动追踪和角度调整。-边缘计算:在车载终端进行实时数据处理,减少对云平台的依赖。 DSM-7疲劳驾驶预警系统PCI盒子会插入主机的PCIe插槽中,通过插槽提供的电力和数据通道与主机进行通信.车辆司机行为检测预警系统定制开发
疲劳驾驶预警系统通常利用机器视觉,人工智能以及传感器技术等多种技术手段来实现驾驶员的身份识别.中国澳门车辆司机行为检测预警系统
(上篇)疲劳驾驶预警设备在商用车上的推荐安装位置需要满足能够时时刻刻监测到驾驶员面部的条件,以确保设备能够有效地捕捉到驾驶员的疲劳状态。以下是一些推荐的安装位置:
中控台或仪表盘:这些位置通常位于驾驶员的正前方,且不会被方向盘或其他驾驶操作部件遮挡,便于设备捕捉驾驶员的面部图像。同时,这些位置也便于驾驶员查看设备状态或接收语音提示。左侧A柱、仪表内部或转向柱后壳体:这些位置同样可以确保设备能够监测到驾驶员的面部,且不会对驾驶员的视线或驾驶操作造成干扰。然而,需要注意的是,这些位置的安装可能需要考虑设备的固定方式和稳固性,以确保设备在行驶过程中不会松动或移位。在安装疲劳驾驶预警设备时, 中国澳门车辆司机行为检测预警系统