机器人力控在提高产品一致性方面展现出独特价值。达宽科技提供的机器人力控系统能够持续监测并调节末端执行器与工件之间的交互力,确保每一次操作都保持稳定可控的状态。例如,在电子元件插装或精密零部件拧紧过程中,若施力过大可能损坏器件,过小则影响连接可靠性。借助机器人力控,机器人可依据工艺要求自动匹配合适的力...
机器人力控基本参数
- 品牌
- 达宽科技,简控机器人,新蓝机器人
- 服务内容
- 软件开发,软件定制,技术开发
- 版本类型
- 普通版,增强版,标准版,测试版,单用户版
- 适用范围
- 企业用户
机器人力控企业商机
随着服务器技术的不断升级,其结构设计和装配工艺也在持续迭代,对装配设备的适应性提出了更高要求。机器人力控凭借良好的灵活性和可调节性,能够快速适配不同型号、不同规格服务器的装配需求。无论是小型服务器的紧凑部件装配,还是大型服务器的多模块对接,机器人力控都能通过参数调整实现高效适配。达宽科技始终聚焦机器人力控技术的创新优化,根据服务器行业的发展趋势,持续完善方案的适配能力,提供定制化的机器人力控配置,帮助企业快速响应产品迭代需求,推动服务器装配从传统模式向智能化、柔性化方向升级,为行业发展注入技术动力。用户利用达宽科技机器人力控,可实现稳定连续的装配作业,提高产出。湖北机器人力控监测
随着制造业智能化转型的推进,机器人力控技术在表面处理领域的应用场景不断拓展。无论是汽车零部件的精密打磨、家具表面的抛光处理,还是五金制品的去毛刺作业,机器人力控都能凭借其灵活性和适应性满足多样化的工艺需求。达宽科技始终聚焦机器人力控技术的创新与应用,根据不同行业的表面处理特点,提供定制化的解决方案,帮助企业实现机器人在更多场景下的高效应用。通过持续优化机器人力控算法和硬件性能,达宽科技让机器人力控技术更加贴近实际生产需求,为企业智能化升级提供有力支持,推动表面处理行业向更高效、更稳定、更安全的方向发展。广西机器人力控抛光达宽的解决方案融合先进机器人力控,推动产线自动化水平向上发展。

机器人力控增强装配过程安全性。线束装配中经常需要处理细小尖锐的端子和金属部件,传统人工操作存在划伤风险。机器人力控系统通过多重安全防护机制,大幅提升了作业安全性。达宽科技的解决方案包括接触力限制、紧急停止和防碰撞检测等功能,当系统检测到异常阻力时会立即停止动作。在连接器插接工序中,机器人力控能够精确控制插入力度,避免因用力过猛损坏昂贵的电子元件。这种安全特性不仅保护了操作人员,也减少了设备损坏和物料浪费。
引入达宽科技的机器人力控方案装配电机齿轮,为制造企业带来多方面价值提升。机器人力控让机器人在精密装配中具备更高的适应性和稳定性,既能满足小批量多型号的柔性生产需求,又能保障大批量生产的质量均衡。通过减少调试时间提升生产效率,通过稳定质量控制降低成本损耗,通过安全机制减少意外损失。这种全流程的优化能力,让机器人力控成为推动电机齿轮装配工艺升级的重要支撑,助力企业在动力部件制造领域持续提升生产效能与市场竞争力。达宽科技机器人力控支持传感器单元快速更换,缩短维护周期。
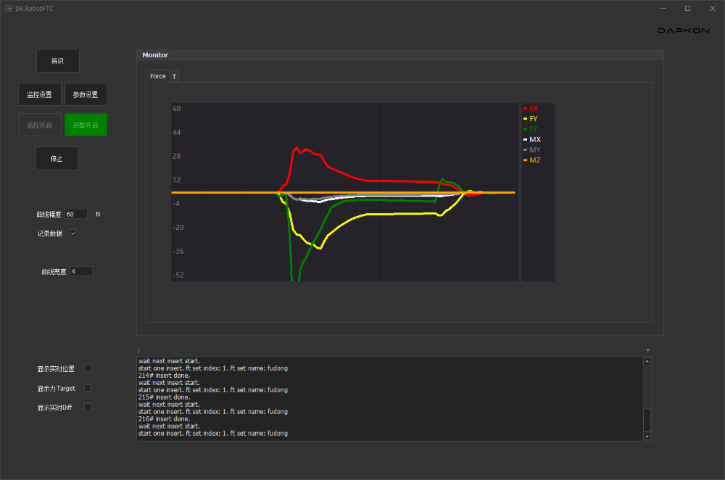
电子组装产线的瓶颈常出现在精密部件装配环节。引入机器人力控技术可实质性改善生产节拍。在散热模组压合、接口端子锁紧等工序中,机器人力控系统通过智能化的力轨迹规划,大幅减少人工干预频率。系统实时解析接触阻力变化趋势,自动优化下压力度和角度,保持产线连续运行。达宽科技的机器人力控解决方案支持主流SMT设备协议,用户可便捷集成到现有生产线。生产主管反馈,应用机器人力控后,PCBA装配工位等待时间减少,工序衔接更紧密,整体设备综合效率得到改善。达宽科技机器人力控开放SDK,开发者自由拓展场景,教育科研创新触手可及。青海机器人力控使用方法
达宽科技的机器人力控方案,为提升PCBA装配效率与质量提供技术支持。湖北机器人力控监测
安全性在生产过程中至关重要,力控系统在线束装配中有效提升了作业安全性。线束装配涉及细小金属接头、电线等部件,人工操作时若力度控制不当,可能出现手部划伤或部件损坏的风险。引入力控系统后,机器人可在设定的安全力值范围内完成操作,当检测到超出安全范围的力值时,会及时调整动作或暂停作业。达宽科技在力控系统设计中融入了多重安全监测机制,通过实时力值反馈和动作调控,降低操作过程中的意外风险,为企业构建更安全的生产环境。湖北机器人力控监测
与机器人力控相关的文章
内蒙古协作机器人力控软件
- 江西机器人力控系统 2026-02-11
- 浙江工业机器人力控报价 2026-02-11
- 中国台湾机器人力控测试 2026-02-11
- 四川协作机器人力控精密装配 2026-02-11
- 广西机器人力控精密装配 2026-02-10
- 青海协作机器人力控方案 2026-02-07
- 北京机器人力控监测 2026-02-07
- 协作机器人力控供应商 2026-02-07
- 广东机器人力控技术指导 2026-02-07
- 中国香港工业机器人力控推广 2026-02-04
- 宁夏机器人力控精密装配 2026-02-01
- 河北工业机器人力控打磨 2026-01-31
与机器人力控相关的产品


与机器人力控相关的新闻
-
中国香港协作机器人力控搬运 2026-01-28 15:03:54机器人力控技术为齿轮装配任务带来切实的效率优化。达宽机器人力控通过实时反馈系统,让机器人自主感知齿轮啮合状态,动态调节装配力度与轨迹。这种自适应能力大幅缩短了调试周期,使单次装配成功机会明显增加。在汽车变速箱产线中,达宽科技的机器人力控方案实现了多规格齿轮的连续装配,设备利用率有效提升。操作人员反馈...
-
云南工业机器人力控抛光 2026-01-28 13:03:55实现大批量电机齿轮装配的质量均一性是生产管理的关键目标。机器人力控技术为此提供了坚实保障。它通过程序化设定的力控曲线和闭环反馈机制,确保每一颗齿轮压装时施加的轴向力和径向力都保持在理想范围内。达宽科技的机器人力控系统具备出色的力控制稳定性。用户在实际产线上验证到,无论是小型直流电机齿轮还是较大型交流...
-
青海工业机器人力控设计 2026-01-28 04:04:16装配操作的安全性对于保护贵重零件和操作人员都至关重要。机器人力控技术为行星齿轮装配提供了内置的安全保障。系统持续监测装配过程中的力变化,一旦检测到异常阻力(如零件错位或异物卡阻),机器人力控系统能瞬间做出响应,限制输出力或暂停运动,防止对齿轮齿面、轴承或设备本身造成损伤。达宽科技的机器人力控方案集成...
-
陕西协作机器人力控装配 2026-01-27 06:04:01达宽科技的机器人力控表面处理方案,为用户提供一站式解决方案,无缝整合到现有机器人系统中,实现任务优化。该方案基于模块化设计,支持快速部署,帮助用户节省调试时间并提高处理效率。机器人力控的在于其自适应能力,能根据不同表面特性调整参数,确保一致输出。达宽科技通过专业支持和持续更新,让机器人力控易于维护,...
与机器人力控相关的问题
新闻资讯
产品推荐
-

浙江新蓝机器人力控系统软件
2026-02-10 -

智能力控系统
2026-02-10 -

江苏达宽力控系统优点
2026-02-10 -
广东达宽力控系统定制
2026-02-10 -

测试力控系统设计
2026-02-10 -

中国香港检测力控系统供应商
2026-02-10 -
江苏协作机器人装配电机
2026-02-10 -

中国香港机器人力控系统配置
2026-02-10 -
浙江简控力控系统原理
2026-02-10