减速电机的关键性能参数中,减速比是选型的首要依据,需根据负载所需转速与电机额定转速计算(减速比 = 电机转速 / 负载转速)。额定扭矩需大于负载峰值扭矩(通常取 1.2-1.5 倍安全系数),否则易导致齿轮崩齿或电机过载。空载转速反映无负载时的输出速度,与额定转速的差值体现机械损耗(一般≤10%)。效率是输出功率与输入功率的比值,齿轮式通常为 70%-95%,蜗轮蜗杆式较低(50%-80%),高效机型可降低能耗成本。工作制(如 S1 连续运行、S3 间歇运行)需匹配实际工况,短时工作的设备(如闸门驱动)可选用额定功率更小的机型。按需选择带刹车功能的减速电机,提升设备安全防护等级。佛山微型减速电机公司

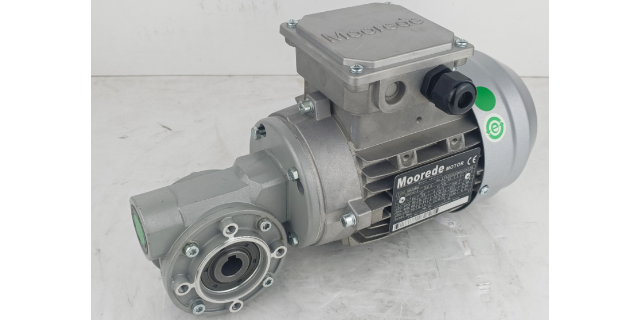
减速电机的选型需遵循 “负载适配” 原则,步骤如下:首先计算负载实际需求(扭矩 T=9550P/n,P 为功率 kW,n 为转速 r/min),考虑冲击系数(1.2-2.0)确定额定扭矩;其次根据电机类型(直流 / 交流 / 伺服)和安装空间(法兰尺寸、轴径)选择结构;再依据工作环境(温度、湿度、粉尘)确定防护等级与材料;验证惯量匹配(负载惯量≤电机惯量 ×10)和效率区间(效率点对应 70%-120% 额定负载)。选型过大导致成本增加和能效降低,过小则易过载失效,必要时需进行工况模拟测试。广东蜗杆减速电机减速电机的接线方式简洁,适配多种控制系统接口。
机器人产业的快速发展,推动了减速电机向高精度、小型化、高集成化方向发展。工业机器人的关节部位是减速电机的关键应用场景,每个关节需通过减速电机实现旋转、摆动等动作,其精度直接决定机器人的运动精度。目前工业机器人关节多采用谐波减速电机或 RV 减速电机,谐波减速电机体积小、重量轻,适合小型机器人;RV 减速电机承载能力强、精度高,适用于重型工业机器人。服务机器人如餐厅机器人、导购机器人,对减速电机的体积与噪音要求更高,需采用微型减速电机,在实现灵活动作的同时,保持低噪音运行,避免影响服务环境。此外,随着机器人智能化程度的提升,减速电机需与传感器、控制器高度集成,实现运动状态的实时监测与故障诊断,配合机器人的控制系统实现更复杂的动作规划,为机器人产业的发展提供关键动力支持。
减速电机的故障诊断可通过多维度数据分析实现。振动分析:正常齿轮振动频谱中,啮合频率(f = 齿数 × 转速 / 60)峰值平稳,磨损后会出现边频带(± 旋转频率);轴承故障则在特定频率(如内圈故障频率 = 0.5× 转速 ×(1 + 球径 / 节圆直径))出现峰值。温度监测:电机绕组温度突升可能是过载或匝间短路,齿轮箱油温异常升高多为润滑不良或齿轮卡滞。油液分析:检测油中金属颗粒(铁含量>50ppm 提示齿轮磨损)和粘度变化(超过新油 20% 需换油)。结合这些数据可实现预测性维护,将故障停机时间减少 30% 以上。减速电机通过严苛质量检测,每一台都符合行业标准。
新能源领域对减速电机的效率和可靠性提出严苛要求。电动汽车的驱动桥减速器(集成电机)需将高速电机(10000-15000rpm)减速至车轮转速(约 1000rpm),行星齿轮结构因高扭矩密度成为主流,传动效率需≥93% 以延长续航。光伏跟踪系统通过减速电机驱动支架转动,跟踪太阳角度,要求耐候性强(-40℃-85℃工作温度)、防护等级 IP65,且具备自锁功能防止风载导致偏移。风电变桨系统的减速电机需输出大扭矩(数千牛米),采用多级齿轮传动,配合绝对值编码器实现角度闭环控制,确保叶片在强风下稳定调节。农业机械中,减速电机为播种机、收割机提供可靠动力支持。中山蜗杆减速电机厂家
仓储物流设备里,减速电机驱动传送带实现精确物料输送。佛山微型减速电机公司
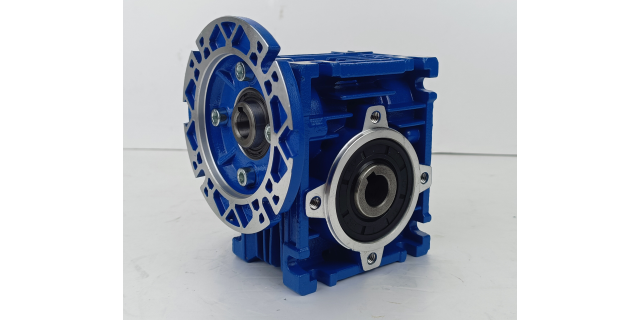
行星齿轮减速电机因紧凑结构和高传动效率成为精密传动的优先选择。其关键为太阳轮、行星轮(3-6 个)、内齿圈的啮合系统:太阳轮输入动力,行星轮围绕太阳轮公转并带动输出轴旋转,内齿圈固定或参与旋转。这种设计使负载由多个行星轮分担,扭矩密度(单位体积输出扭矩)比普通齿轮减速电机高 30% 以上,传动效率可达 90%-97%。单级减速比通常为 3:1-10:1,多级组合可实现 1000:1 以上的大减速比。在伺服系统中,行星减速电机能提升控制精度,通过消除齿隙(精度可达≤1 弧分)满足机器人关节、数控车床等对定位误差的严苛要求,其对称结构还能有效平衡径向力,降低振动。佛山微型减速电机公司