动态信号分析仪的一个常见应用是测量机械系统的频率响应函数(FRF)。这也称为网络分析,系统的输入和输出同时测量。通过这些多通道测量,分析仪可以测量系统如何“改变”输入。一个常见的假设是,如果系统是线性的,那么这个“变化”被频率响应函数(FRF)充分描述。事实上,对于线性和稳定的系统,只要知道频率响应函数,就可以预测系统对任何输入的响应。宽带随机、正弦、阶跃或瞬态信号在测试和测量应用中被***地用作激励信号。图1说明了一个激励信号x,可以应用于一个UUT(测试单元),并生成一个或多个由y表示的响应,输入和输出之间的关系称为传递函数或频率响应函数,由H(y,x)表示。一般来说,传递函数是一个复杂的函数,描述系统如何将输入信号的大小和相位作为激励频率的函数。动态信号采集分析系统。广东8通道控制器
Spider-80SG的桥路校准向导使用方便并具有较强灵活性。桥路校准无需外接线路,全部是内置自动完成的。基于桥路校准的桥路类型,用户可以选择任何一个合理的桥臂。**终,桥路电阻将与桥臂连接。此外,这种灵活性使得用户能够使用Spider-80SG桥路电阻或任何自己设定的桥路电阻。并不是所有的应变式的设计一样。事实上,许多不同的制造商有的不同的模型和类型。这就是为什么Spider-80SG允许用户在每个输入通道的每个**针上自定义电压激励。零位偏移是将标定功能集成在Spider-80SG软件部分,这将使得操作更简单。所有需要做的是将应变仪连接到Spider-80SG,零位偏移功能,Spider-80SG将自动处理完成。 贵州振动测试控制方法压路机发动机舱内空气滤清器振动测量。

EDM–RCM来扩展动态信号分析(DSA)的功能。这些功能与Spider平台集成从而能够对远程仪器和设备进行可靠的监测。通过使用蜂窝数据连接的移动无线网关,EDM–RCM可以远程连接由多台Spider组成的包含任意通道个数的Spider系统。EDM–RCM软件可以通过一个静态公共IP地址访问每一个Spider系统。利用无线移动网关提供的静态公共IP地址可确保全球范围内的远程连接。EDM–RCM软件通过独特的设计,除了为世界各地的Spider前端提供必要数据的***结果外,还可以同时连接多个此类Spider系统。该软件可以根据需要提供来自任何Spider系统的实时数据视图,也可以从任意Spider前端下载记录文件以供进一步分析和推断。
Spider随机测试模式中的峭度用于随机振动的振幅分布。峭度,测试可以更好的模拟现实世界的环境。在现实世界中的许多振动的环境中,信号都具有高峭度值的特征(相对于高斯随机)。这些环境中的振动疲劳和损坏力比纯高斯随机信号高。因此,采用传统的高斯随机信号作为测试信号实际上只能在产品的服务环境中进行测试。峭度可以用一个标准化的K值表示,这个值是由第四统计矩除以第二统计矩的平方得来。下面的等式为N个采样点时的K值计算。 远程状态监测系统RCM。
一次随机测试在特定频带上产生多个频率,而正弦扫频测试只产生一个频率,并且该频率预先设置的范围内扫描。利用信号的反馈调节输出幅值,使UUT的响应幅值与测试目标谱相匹配。测试目标谱是幅值(通常定义为峰值加速度)与频率的关系图。RSD、RSTD,是正弦扫频测试的扩展。正弦扫频过程包括产生一个正弦波输出,在测试中激励待测设备,检测信号输入幅值,将检测到的与参考幅值进行比较,并适当地更新驱动信号幅值。为了测量输入信号的水平,探测器可以使用滤波器,或者可以测量信号的RMS、峰值或平均值。当使用滤波器时,会产生振幅和相位数据,而其他测量方法只产生幅值数据。如果使用多个通道,则每个检测器的输出在通道平均块中进行组合。滤波器**降低了正弦驱动频率上下的噪声和谐波信号。他们的中心频率总是调整到当前的驱动频率,使得其他信号不被测量和。滤波器带宽可以是固定的,也可以是与当前频率成比例的。基于当前中心频率和带宽,晶钻仪器的Spider振动测试系统不断更新滤波系数。它有一个约为-60分贝。滤波器的输出被平均以产生一个幅值,然后由比较器用来校正输出驱动幅值。 经典冲击对瞬态信号提供精确、实时、多通道分析。湖南64通道控制设备
多正弦kongzhi能同时扫频多个正弦信号。广东8通道控制器
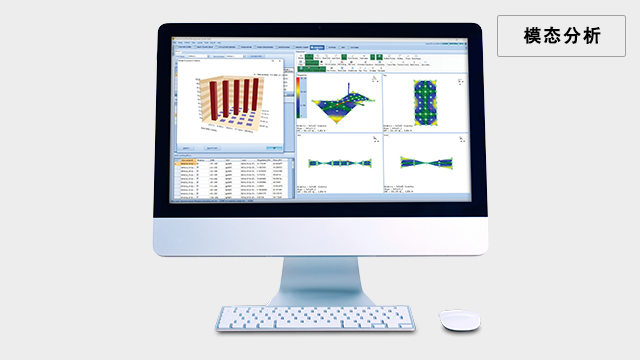
数值信号显示不能直观表示被测结构振动强度和分布。结构的变形动画可以让用户清晰直观地观察到结构的振动强度。它利用彩色图颜色的深浅图形化显示振动的大小,帮助用户找到测试单元振动强度的**大处和**小处。这需要先构建被测结构的三维几何模型。然而由于测试件在x、y、z坐标上尺寸和几何的复杂性,创建测试件的三维模型往往具有挑战性。晶钻仪器公司开发的振动可视化功能,只需要简单的几个步骤就可以生成任何复杂结构的三维几何模型,而且可以显示结构的变形动画。这让被测结构在振动测试过程中的振动强度可视化。 广东8通道控制器