- 品牌
- 佳控科技
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
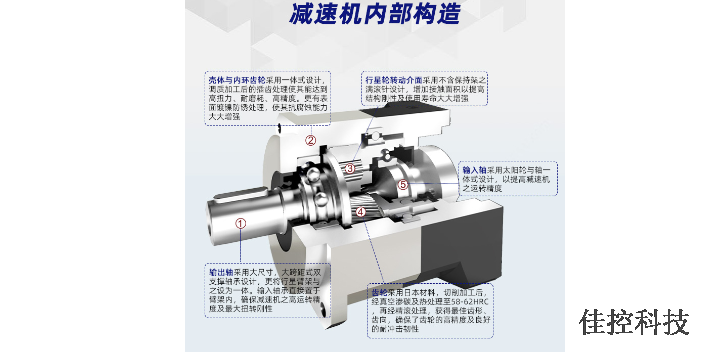
精密行星减速机的工作原理基于齿轮传动。当动力从输入轴传递到太阳轮时,太阳轮开始转动。太阳轮的旋转带动与其啮合的行星轮转动,行星轮在自转的同时围绕太阳轮公转。由于行星轮与内齿圈也相互啮合,内齿圈固定不动,行星轮的公转运动通过行星架输出。通过合理设计太阳轮、行星轮和内齿圈的齿数比,可以实现不同的减速比。例如,若太阳轮有 10 个齿,行星轮有 20 个齿,内齿圈有 50 个齿,根据行星减速机的传动比计算公式,可以得出相应的减速比。这种齿轮传动方式使得动力在传递过程中能够精确地减速,并且能够保证较高的传动效率,减少能量损失,为需要精确速度和扭矩控制的设备提供了可靠的动力传输解决方案。减速机通过降低转速,增加扭矩,满足各种机械需求。上海齿轮减速机产品介绍
伺服电机减速机错位是指什么?电机减速机错位即是失步,失步分为丢步和越步。步进电动机正常工作时,每接收一个控制脉冲就移动一个步距角,即前进一步。若连续地输入控制脉冲,电动机就相应地连续转动。丢步时,转子前进的步数小于脉冲数;越步时,转子前进的步数多于脉冲数。一次丢步和越步的步距数等于运行拍数的整数倍。丢步严重时,将使转子停留在一个位置上或围绕一个位置振动,越步严重时,拖动结构将发生过冲。关于步进电机减速机丢步和失步的分析:步进电机减速机选型不当,电机力矩不够或者物体运动的惯量超过电机自锁力,造成的丢步或失步。驱动器选型不当,配套的驱动器电流偏小,影响电机正常运转,现在市面上很多电流虚标的驱动器,拿峰值电流当额定电流来忽悠消费者,驱动器选型额定电流应大于步进电机减速机额定电流的1.2-1.5倍。配套电源选型不当,配套电源应是驱动器额定电源的1.5-2倍,电源虚标比驱动器虚标更严重。控制部分应排除干扰,远离变频器,防静电。金山区专业减速机现价有键空心输出轴与工作机轴联接时应涂防锈油,装入时应轻松推入或用螺旋拉入。
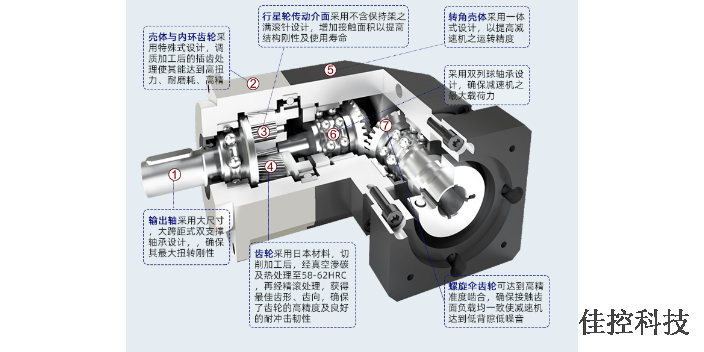
精密行星减速机具有出色的承载能力,这主要归因于其独特的结构。多个行星轮均匀分布在太阳轮周围,共同承担负载,使得每个行星轮所承受的载荷相对较小。同时,行星轮与太阳轮、内齿圈之间的啮合方式能够有效地传递和分散扭矩。这种结构设计使得行星减速机在处理大扭矩负载时表现优异。例如,在重型机械的驱动系统中,行星减速机可以承受巨大的扭矩,确保机械的稳定运行。在起重机的起升机构中,行星减速机能够可靠地承载重物的重量,并将电机的动力转化为合适的起升速度和扭矩,保证起吊过程的安全和稳定,满足工业生产中对大负载设备的驱动需求。
随着科技的发展,精密行星减速机朝着高精度化方向发展。在现代工业生产和**装备制造中,对角度、位置和速度的控制精度要求越来越高。为了满足这些需求,行星减速机制造商通过不断改进设计和制造工艺来提高精度。在设计方面,利用先进的计算机辅助设计软件,对齿轮的参数进行更精确的优化,进一步减小回程间隙和提高定位精度。在制造工艺上,采用超精密加工技术,如纳米级别的磨齿工艺,使齿轮的齿形精度和表面光洁度达到更高水平。高精度化的发展趋势使得行星减速机在半导体制造、光学仪器等对精度要求苛刻的领域有更广泛的应用。减速机在工业生产中扮演着重要的角色,对于提高生产效率和质量具有重要意义。

先将差速器轴承调整螺母按相对方向调紧,直到差速器轴承不能转动为止,或在半浮式后桥壳差速器轴承止推面底部加足垫圈,以不让差速器抽承转动为止。然后以0.05-0.08毫米薄厚的垫片逐渐拆垫或松动螺母,使差速器在其位置上转动自如,达到用手拨转一次能转1-2转为好。但必须注意,应以差速器轴承盖或半浮式后桥壳紧固后的轴承间隙为准。如果用调整螺母的方法调整好的轴承间隙,在紧固差速器轴承盖后轴承间隙出现变化,轴承不能转动,这是轴承外套受轴承盖压力的原因!
齿轮减速电机按国家专业标准ZBJ19004生产技术要求制造,具有很高的科技含量;上海齿轮减速机产品介绍
减速机是工业设备中的重要部件,确保动力传输的稳定。上海齿轮减速机产品介绍
行星减速机的精度单位为孤分:1度分为60弧分。例如,当回程间隙标记为1min时,表示减速机每转一圈,输出端的角度偏差为1/60。在实际应用中,这个角度偏差与轴的直径有关,b = 。也就是说,当输出端半径为500mm时,齿轮箱的接触度为10,即a"=3/60,减速机一转的偏差为B = 0.44mm,行星齿轮箱的传动精度也叫回程间隙。减速机的回程间隙是当输出端固定,输入端顺时针和逆时针旋转,使输出端产生2%的额定扭矩时,减速机的输入端有微小的角位移,这就是回程间隙!
上海齿轮减速机产品介绍
- 黄浦区精密减速机厂家供应 2026-04-21
- 静安区专业减速机厂家供应 2026-04-21
- 浦东新区高精密减速机哪个好 2026-04-21
- 崇明区转角高精密减速机现价 2026-04-21
- 精密减速机大概多少钱 2026-04-21
- 转角高精密减速机哪里好 2026-04-21
- 宝山区减速机供应商 2026-04-21
- 浙江高精密减速机供应商 2026-04-21
- 松江区K系列螺旋锥齿轮减速机大概多少钱 2026-04-20
- 嘉定区高精密减速机供应 2026-04-20
- 宝山区硬齿面减速机哪个好 2026-04-20
- 静安区高精密减速机现价 2026-04-19
