- 品牌
- 佳控科技
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
精密行星减速机的工作原理基于齿轮传动。当动力从输入轴传递到太阳轮时,太阳轮开始转动。太阳轮的旋转带动与其啮合的行星轮转动,行星轮在自转的同时围绕太阳轮公转。由于行星轮与内齿圈也相互啮合,内齿圈固定不动,行星轮的公转运动通过行星架输出。通过合理设计太阳轮、行星轮和内齿圈的齿数比,可以实现不同的减速比。例如,若太阳轮有 10 个齿,行星轮有 20 个齿,内齿圈有 50 个齿,根据行星减速机的传动比计算公式,可以得出相应的减速比。这种齿轮传动方式使得动力在传递过程中能够精确地减速,并且能够保证较高的传动效率,减少能量损失,为需要精确速度和扭矩控制的设备提供了可靠的动力传输解决方案。减速电机工作机之间的联轴器建议采用弹性联轴器。浙江现代化减速机品牌

行星减速的原理实际上与齿轮减速的原理相同。行星轮系统的主要特征是它至少有一个行星轮。行星轮不仅绕着自己的轴旋转,而且绕着另一个固定轴旋转。与行星一样,它在特征轨道上围绕太阳运行,因此被称为行星减速器。行星减速器说到底是一种减速设备。在保证精密传动的前提下,降低转速,增加扭矩,降低负载/电机的旋转惯性比。行星减速器采用渐开线行星齿轮传动。应用于自动化、农业、舞台照明、能源(太阳能)、汽车起重、交通监控、消防监控、云台、道路大门等领域。现在用的比较多的领域可能就是伺服电机了,伺服电机搭配行星减速机能够极大的减少成本,因为大多数情况下一个减速机要比伺服电机便宜多了,所以很多时候厂家为了经济考虑,会使用伺服电机搭配减速器的作法。但是它们搭配一定要注意确定好伺服电机的功率、法兰大小、减速比等关键参数,只有这样才能达到想要的效果。专业减速机产品介绍减速机的种类繁多,可满足不同工业领域的需求。
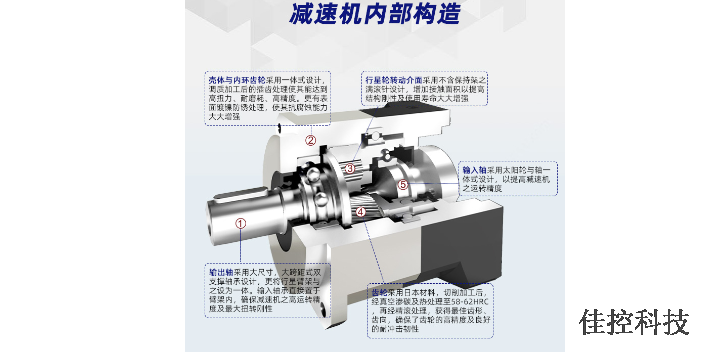
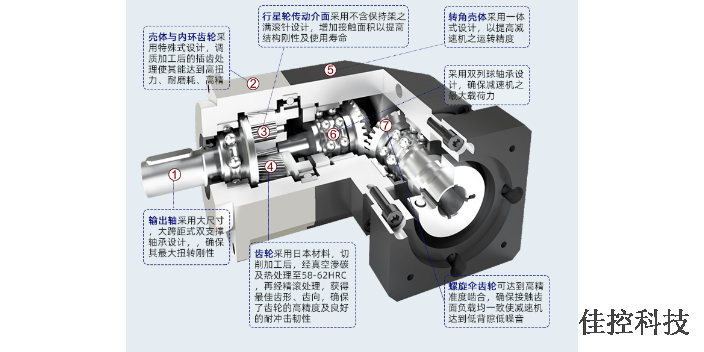
精密行星减速机主要由太阳轮、行星轮、内齿圈和行星架等部件构成。太阳轮位于中心位置,它与输入轴相连,动力由此输入。行星轮围绕太阳轮公转的同时进行自转,通常有多个行星轮均匀分布,这种设计使得受力更加均匀。内齿圈是固定的环形齿轮,与行星轮相互啮合。行星架则用于支撑行星轮,并输出减速后的动力。这种独特的结构赋予了行星减速机许多优点,比如在相同的空间内可以实现更大的传动比。与其他类型的减速机相比,它的结构紧凑,能够高效地传递扭矩,并且由于多个行星轮分担负载,具有较高的承载能力,广泛应用于对精度和可靠性要求较高的自动化设备、机器人等领域。
行星减速机的精度单位为孤分:1度分为60弧分。例如,当回程间隙标记为1min时,表示减速机每转一圈,输出端的角度偏差为1/60。在实际应用中,这个角度偏差与轴的直径有关,b = 。也就是说,当输出端半径为500mm时,齿轮箱的接触度为10,即a"=3/60,减速机一转的偏差为B = 0.44mm,行星齿轮箱的传动精度也叫回程间隙。减速机的回程间隙是当输出端固定,输入端顺时针和逆时针旋转,使输出端产生2%的额定扭矩时,减速机的输入端有微小的角位移,这就是回程间隙!
减速机的工作原理基于齿轮传动,实现动力的平稳转换。

在机器人领域,精密行星减速机在关节部位有着至关重要的应用。机器人的关节需要精确控制角度、速度和扭矩,以实现灵活多样的动作。精密行星减速机能够满足这些要求。它安装在电机和机器人关节之间,对电机的高速输出进行减速。例如,在工业机械臂的关节中,电机的高转速经过行星减速机的减速后,转化为合适的关节转动速度,同时能够精确地控制关节的扭矩输出。这使得机械臂在抓取、放置等操作中能够准确地定位和施加合适的力量。对于多关节协作的机器人,每个关节上的行星减速机都能保证动作的准确性和稳定性,从而使机器人可以完成复杂的任务,如汽车组装线上的精确焊接、零部件安装等,**提高了机器人的工作性能和生产效率。对蜗轮蜗杆减速电机不能对减速机(自锁)施加逆向传动的较大负荷。浙江现代化减速机品牌
通过减速机,我们可以有效地控制机械设备的运行速度。浙江现代化减速机品牌
这里包括了两种,一种角传动精度,这是减速机手册里都会标出来的,这影响的是机器人的定位精度;另一种是重复定位精度,这是减速机手册里没有,这影响的是机器人的重复定位精度。角传动精度一般减速机厂家都有专业的设备,但是客户自己也可以设计一些简易的方法去测。重复定位精度也一样。对于新减速机来说,要达到标称的1弧分以下,很多厂家是OK的,但是比较大的问题是一致性和稳定的。可能大部分厂家一开始精度都达标,但几个月后,要么精度跳上跳下,要么直接是越来越差;重复定位精度也如此,短时间内达到较高重复定位精度是没什么问题,但是时间长了,如何保持住就很难了!!浙江现代化减速机品牌
- 黄浦区精密减速机厂家供应 2026-04-21
- 静安区专业减速机厂家供应 2026-04-21
- 浦东新区高精密减速机哪个好 2026-04-21
- 崇明区转角高精密减速机现价 2026-04-21
- 精密减速机大概多少钱 2026-04-21
- 转角高精密减速机哪里好 2026-04-21
- 宝山区减速机供应商 2026-04-21
- 浙江高精密减速机供应商 2026-04-21
- 松江区K系列螺旋锥齿轮减速机大概多少钱 2026-04-20
- 嘉定区高精密减速机供应 2026-04-20
- 宝山区硬齿面减速机哪个好 2026-04-20
- 静安区高精密减速机现价 2026-04-19