- 品牌
- 佳控科技
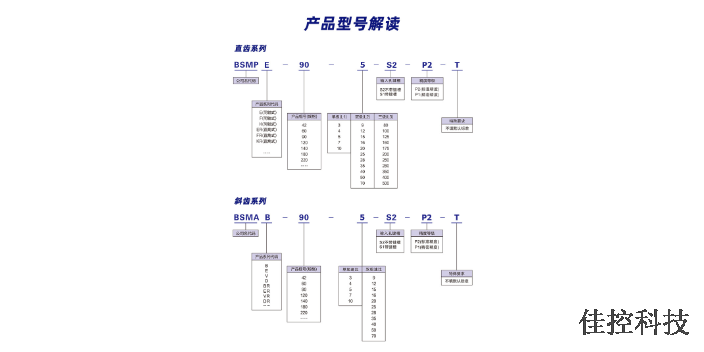
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
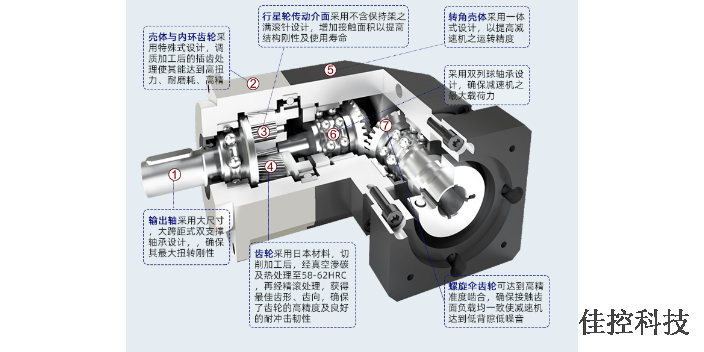
当今工业机器人的先进程度令人惊叹,尤其是那些智能5轴机器人、六轴机器人,有这么多关节,还能准确传递动作和指令,各部分紧密配合完成复杂的工作,让人不禁好奇它们的传动系统是什么样的?真正的工业机器人关节是什么结构?说到关节,主要是指工业机器人的重要基础部件,也是运动部件:精密减速机。这是一种精密的动力传递机构,它利用齿轮速度转换器将电机的转数降低到所希望的数目,获得更大扭矩的装置,从而降低转速,增加扭矩。谐波减速器由三部分组成:谐波发生器、柔性论和刚轮,其工作原理是由谐波发生器使柔轮产生可控的弹性变形。黄浦区现代化减速机哪个好
行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速其实就是齿轮减速的原理。行星轮系**主要的特征是它至少具有一个行星轮,行星轮既绕自身轴线自转,又绕另一固定轴线公转,好像行星一样,系围绕太阳在特点轨道运转,称此机构减速机为行星减速机。行星减速机是一种用途***的减速设备,主要保证精密传动的前提下被用来降低转速增大扭矩和降低负载/电机的转动惯量比。行星减速机采用渐开线行星齿轮传动,合理利用内、外啮合、功率分流,箱体采用球墨铸铁,**提高了箱体的钢性及抗震性;齿轮均采用渗碳淬火处理,得到高硬耐磨表面,齿轮热处理后全部磨齿,降低了噪音,提高了整机的效率和使用寿命。虹口区高精密减速机供应对减速机的寿命而言,扭力计算非常重要,并且要注意加速度的最大转矩值,是否超过减速机之最大负载扭力。

对于减速机的选择,除了上述的参数选择,还要对减速机的类型和安装方式进行选择,例如你选择的减速机是行星减速机,还是蜗轮蜗杆减速机,是同轴直联式,还是90度垂直安装等等。特别是对于蜗轮蜗杆减速机的选择,有其特定的应用场景,例如要求整个运动机构具备自锁功能,我们很多时候都有这样的设计需求,例如传动机构是垂直安装的时候,为了避免机构在电机断电后下坠,通常我们选择蜗轮蜗杆式的减速机。当然很多人会抬杠说可以选择带抱闸的伺服电机,其实理论上是可以的,而且通常垂直方向的伺服电机我们都会选择抱闸电机,但是我们在实际的应用中会发现,伺服电机在通电的瞬间很多机构会出现微量下坠的现象,如果这个时候你选择的是蜗轮蜗杆的减速机,那就可以很好的避免这样的现象,因为蜗轮蜗杆的减速机是带自锁功能的。当然这个自锁是有前提的,传动比要大于一定的比值,蜗轮蜗杆的减速机才能真正起到自锁的作用,减速比太小依然是不可靠的,具体的比值我忘记了(好像是要超过30,不确定),在使用的时候可以和减速机厂家好好的沟通一下,他们有相关参数的。所以选择什么样的型号的安装方式也很重要,并不是随心所欲的去做选择的。
非接触式振动传感器有多种形式,其测量工作原理各不相同,主要形式有:电容式、感应式及涡流式传感器。由于涡流式传感器具有频率范围较宽、尺寸较小并且对工作环境条件变化不敏感等优点,所以在齿轮装置的测量中应用的较为普遍。非接触式传感器一般用于测量齿轮轴和轴承座之间的相对运动。将两个探头互相垂直的放置在规定的测量表面上,齿轮轴的运动轨迹就可通过示波器显示出来。大多数飞接触式传感器(主要指涡流式传感器)可用来确定轴在轴承间隙里的位置。由于齿轮一般采用20CRMNTI材料制成,运转时速度又非常高,一般能达到1500转左右。

今工业机器人的先进程度让人叹为观止,尤其是那些灵动的5轴、6轴机器人,具有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让人不禁好奇它们的传动系统到底是怎样的???真正的工业机器人关节到底是什么结构的呢?说起关节,主要是指工业机器人重要的基础部件,也是运动的部件:精密减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。齿轮减速电机按国家专业标准ZBJ19004生产技术要求制造,具有很高的科技含量;青浦区高精密减速机排行榜
齿轮是减速机内部的零部件,减速机工作时,齿轮与齿轮之间相互啮合,从而达到传递动力的效果。黄浦区现代化减速机哪个好
根据市场调研,一般情况下通用工业机器人有4-6个自由度,需要的减速器个数为4-6个。取中间值,假定我国工业机器人平均需要减速器5台,减速机存量替换量为5%,结合我国近年来工业机器人销售量以及保有量,测算出2016年我国机器人减速机的市场需求量在52万台左右。结合工业机器人产业相关的发展预测所得出的工业机器人未来的销售量和保有量,以及减速机平均需求量(考虑到工业机器人应用范围的夸扩大以及小型化发展,综合各方观点,认为工业机器人减速机平均需求量将会呈下降趋势),可以预测到2020年我国机器人减速机需求量约为74万台,到2025年将达到105万台,市场需求规模将在77亿元左右。黄浦区现代化减速机哪个好
- 黄浦区精密减速机厂家供应 2026-04-21
- 静安区专业减速机厂家供应 2026-04-21
- 浦东新区高精密减速机哪个好 2026-04-21
- 崇明区转角高精密减速机现价 2026-04-21
- 精密减速机大概多少钱 2026-04-21
- 转角高精密减速机哪里好 2026-04-21
- 宝山区减速机供应商 2026-04-21
- 浙江高精密减速机供应商 2026-04-21
- 松江区K系列螺旋锥齿轮减速机大概多少钱 2026-04-20
- 嘉定区高精密减速机供应 2026-04-20
- 宝山区硬齿面减速机哪个好 2026-04-20
- 静安区高精密减速机现价 2026-04-19