安装360全景摄像注意的事项:连接线路的时候,很多小型的装饰城,甚至是私营的修理厂他们只不过是把线路破坏以后,把360需要连接的线路连接用胶带缠一下就完事了,在这种情况下肯定是不靠谱的。如果一旦发生漏水或者有虚连的情况,会导致线路过热而造成自燃,或者是线路虚连接,而造成360摄像不好用。如果在4s店安装的情况下,那么也在车辆的质保范围之内,但是他质保肯定是有一个期限的,具体安装的时候还要协商!较好还是有一个书面的合同或者是协议,要求一个长时间的质保!如果在大型的汽车美容装饰城安装360全景摄像对比4s店收费肯定要更低一些,但是如果由于线路连接的问题,给车辆带来不必要的损失或者是故障,那么这4s店是不享受质保的,在这种情况下,可以要求汽车美容装饰城,给一个书面的协议,书面的合同,一个质保的时间,也是没问题的!汽车360度全景影像实用吗?油罐车360全景环视设备品牌
汽车360全景技术介绍:在后装市场,全景影像系统和当年导航的发展轨迹是一样的。只要一个功能是实用的能为消费者认可,整合是个必然结果。将来360全景系统和导航的结合也是一个必然趋势。全景影像系统从分屏显示到有缝拼接再到无缝全景,再到2D+3D全景。逐步增大视野范围及安全性。当下全景环视不但充分发挥自己的产品特点,同时也融合了如ADAS,DMS,雷达,胎压等一些列有助于行车安全的系统。使更对的有益的系统联动,也更好的提升了驾驶体验。3D360盲区侦测系统价钱车侣360全景影像与BSD盲区预警的融合作用。

车侣360全景影像系统与画面分割器相结合使用,可以实现以下效果:精确的物体识别:画面分割器可以通过将图像分割成不同的区域,从而更准确地识别和提取出画面中的各个物体。结合360全景影像系统,可以实现对全景画面中的物体进行更精确的识别和分割,提高对不同物体的准确性和可视化效果。增强目标检测和追踪:画面分割器可以将画面中的不同物体进行分离和跟踪,从而实现目标检测和追踪的功能。结合360全景影像系统,可以在的视野中实现更和细致的目标检测和追踪,提供更丰富的场景信息和更准确的目标位置。场景理解和分析:360全景影像系统与画面分割器的结合可以进一步提高对场景的理解和分析能力。通过将画面分割为不同的区域或物体,可以更深入地分析场景中的各个元素,如车辆、行人、建筑物等,进而实现更细致的场景理解和分析,为决策和应用提供更多的场景信息。总体而言,将360全景影像系统与画面分割器相结合使用,可以提高物体识别的精确性,增强目标检测和追踪的能力,以及加强场景理解和分析的效果。这将提高系统的功能和智能化水平,为各种应用场景提供更好的视觉信息和分析支持。
车侣360全景影像系统与毫米波雷达融合使用可以带来以下几个方面的使用价值:强化障碍物探测能力:360全景影像系统可以提供的视觉信息,能够帮助识别环境中的物体和障碍物。而毫米波雷达则能够通过发射和接收微弱的毫米波信号,精确测量物体的距离、速度和方向。融合这两种技术可以增强系统在复杂环境中的障碍物探测能力,提高安全性和准确性。实现远距离探测和预警:毫米波雷达具有较高的穿透能力和远距离探测能力,能够在复杂天气条件下实现远距离障碍物探测和跟踪。将其与360全景影像系统融合使用,可以实现更早的障碍物预警和辅助驾驶决策,提高驾驶员的安全性和警觉性。提高不可见区域的感知能力:360全景影像系统在某些情况下可能无法完全覆盖车辆周围的盲区或不可见区域,例如车身底部或侧面。而毫米波雷达能够穿透非金属物体,可用于检测盲区内的障碍物。通过融合使用这两种技术,可以提高对不可见区域的感知能力,减少潜在的安全风险。总体而言,360全景影像系统融合毫米波雷达可以增强障碍物探测能力、实现远距离探测和预警,并提高对不可见区域的感知能力。这样的融合使用可以提高驾驶安全性,减少事故风险,并为驾驶员提供更可靠的辅助驾驶功能。 360全景影像兼容前装导航,界面完美匹配。

(下篇)车载AI360全景影像系统的技术原理: AI算法通过深度学习等技术对图像中的目标进行特征提取和识别,能够准确地识别出车辆周围的行人、车辆、障碍物等物体。物体识别精度:AI算法通过不断优化和训练,提高物体识别的精度和鲁棒性。它能够应对不同光照条件、遮挡情况、复杂背景等挑战,确保识别的准确性和可靠性。四、预警机制设计预警触发条件:当AI算法识别到潜在的危险源时,如行人、车辆等物体靠近车辆到一定距离时,系统会触发预警机制。预警方式:预警方式可以包括声光预警、语音提示等。系统会通过车载显示屏、扬声器等设备向驾驶员发出预警信号,提醒驾驶员注意潜在的危险。五、系统稳定性与可靠性抗干扰能力:车载环境复杂多变,系统需要具备较强的抗干扰能力,以应对电磁干扰、振动、温度变化等不利因素的影响。故障自诊断与恢复:系统应具备故障自诊断与恢复能力,能够在发生故障时及时报警并尝试恢复正常运行,确保行车安全。综上所述,车载AI360全景影像系统的技术原理,通过集成AI算法实现预警与物体识别功能的技术原理是一个复杂而精细的过程。它涉及到图像采集与传输、图像拼接与融合、AI算法集成与物体识别以及预警机制设计等多个方面。 360全景与倒车影像的区别?3D360盲区侦测系统价钱
360全景和雷达融合用于机器人导航作业监控,获取周围全景视图,实时检测障碍物和动态目标,自主导航和避障.油罐车360全景环视设备品牌
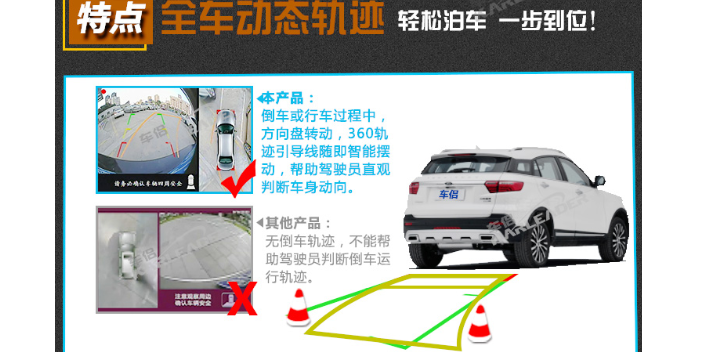
360度全景影像的较主要作用是什么?360度全景倒车影像是一套通过车载显示屏幕观看汽车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助汽车驾驶员更为直观、更为安全地停泊车辆的泊车辅助系统,又叫全景泊车影像系统或全景停车影像系统(有别于目前市面上把汽车四周画面在显示屏幕上进行分割显示的“全景”系统)。有的地方也称全车可视系统、全景可视系统、全景泊车系统、360度全车可视系统,它是后视倒车影像系统的升级换代产品,是较新的真正意义上的“全景倒车影像系统”。油罐车360全景环视设备品牌