360度全景影像是一项工程车安全配置,与普通倒车影像系统相比,其中心在于在车头、车侧增加了多个摄像头,通过车载显示屏幕可观看工程车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助工程车驾驶员更为直观、更为安全地停泊车辆。原理:景物通过镜头生成的光学图像投射到图像传感器表面上,然后转为电信号,经过模数转换装置转换后变为数字图像信号,再送到数字信号处理芯片中加工处理,之后通过USB接口回传给图像处理单元。在图像处理单元中,电脑将对它们进行变形、拼接处理,从而形成一张从车顶鸟瞰的俯视图。这样独特的视角可以很好地帮助缺乏车感的驾驶员去理解自己的走向和位置。精拓电子工程车360全景系统可以记录各个部位的实时影像。推土车360盲区侦测系统采购
360度全景影像是一项工程车安全配置,与普通倒车影像系统相比,其中心在于在车头、车侧增加了多个摄像头,通过车载显示屏幕可观看工程车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助工程车驾驶员更为直观、更为安全地停泊车辆。原理:景物通过镜头生成的光学图像投射到图像传感器表面上,然后转为电信号,经过模数转换装置转换后变为数字图像信号,再送到数字信号处理芯片中加工处理,之后通过USB接口回传给图像处理单元。在图像处理单元中,电脑将对它们进行变形、拼接处理,从而形成一张从车顶鸟瞰的俯视图。这样独特的视角可以很好地帮助缺乏“车感”的驾驶员去理解自己的走向和位置。 履带吊360鸟瞰全景影像雷达预警精拓电子工程车360全景系统能辅助我们更加安全地倒车入库。
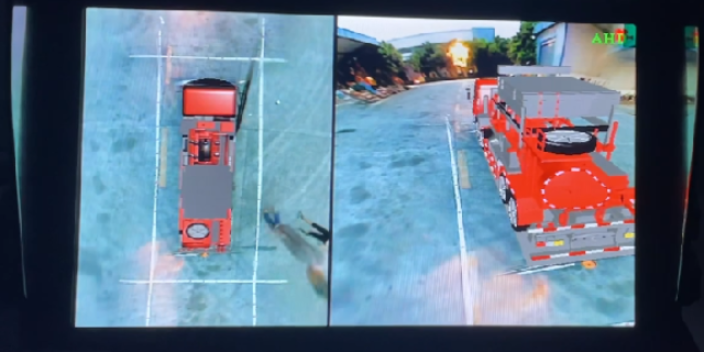
工程车360系统一般包含几个方面?智能环视系统360(AVM):通过安装在车身周围前后左右的 4 个超广角、高清夜视摄像头,实时采集车身四周的高清视频画面,在 图像处理器中经过360算法畸变矫正、变换、图像拼接和融合等处理,终合成车身周围 360°的鸟 瞰全景画面,并显示在车载显示屏上,为司机提供 360°全景驾驶辅助。盲区行人检测(BSD):盲区行人监测系统(BSD)BSD盲区监控系统实时监控处于车辆后视镜可 视范围外的盲点区域,对区域内移动的物体 (车辆、非机动车、行人)进行距离探测,根据 等级进行报警。支持拐弯、直行+拐弯两种类 型检测。
工程车360度全景可视辅助系统是由精拓公司研发,通过安装在车身前后左右的4个广角摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅车辆四周的360度全景俯视图,实时传送到中控台的显示设备上。行车辅助系统通过安装在车身前后左右的4个广角摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅车辆四周的360度全景俯视图,实时传送到中控台的显示设备上。通过360度全视界鸟瞰全景行车辅助系统,驾驶员坐在车中即可直观地看到车辆所处的位置以及车辆周围的障碍物,从容操控车辆泊车入位或通过复杂路面,有效减少刮蹭、碰撞、陷落等事故的发生。精拓电子工程车360全景系统可以进行图像的视角转化。

辨别真假360度工程车全景的方法:录像存储稳定-固态存储,系统自检,真正的工程车360度全景还要具有合格的行车记录仪功能,这里有重要的一点就是可以有效储存拍摄的画面,市面上大部分用外接U盘存储录像的丢失率高达70%,所以真正的360度全景必须自带固态存储,固态存储的稳定性高达99%,这样才可以稳妥的保存关键时刻的碰撞录像。360度全景将逐渐淘汰普通行车记录仪,1、车身两边侧面的实时图像也要记录;2、引擎盖下方离车近时要看得到;3、开车人需要知道记录是否在工作;4、固态录像存储,录像意外提醒;5、完善的文件管理和全景画面回放。精拓电子工程车360全景系统能减少出现碰撞和刮蹭的事件发生。履带吊360鸟瞰全景影像雷达预警
精拓电子工程车360全景系统要具有稳定运行的行车记录仪功能。推土车360盲区侦测系统采购
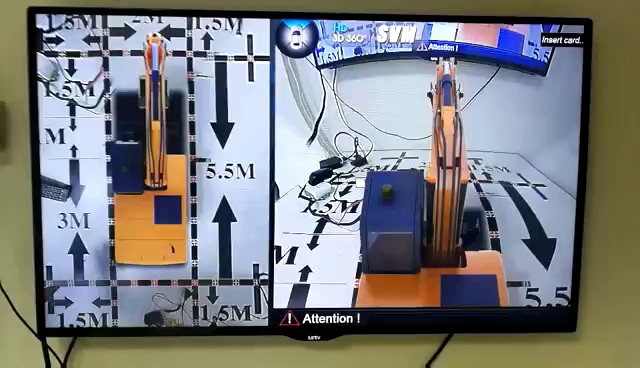
工程车360度全景影像系统:3D全屏当车速大于30km/h,处于安全考虑将自动关闭全景影像。在P档进入多媒体桌面的泊车影像图标,进入全景影像模式后,点击屏幕左侧悬浮键,调出360度功能菜单。360度功能菜单以三色轨迹线标示前后影像内实景距离本车的距离。静态轨迹线四个刻度从近到远分别为0.4m、0.8m、1.5m、3.0m。动态轨迹线,主要用于标记车辆车轮即将行驶至的位置,将随着驾驶员方向盘的转动而变化。倒档进入360度全景影像时,如果选择“R档退出5秒延迟”(在车机中设置),360度全景影像会在退出R档5秒后自动退出。如果没有选择“R档退出5秒延迟”,360度全景影像会在车速高于30km/h时自动退出。 推土车360盲区侦测系统采购
广州精拓电子科技有限公司成立于2006-05-10,位于田心大道8号三楼,公司自成立以来通过规范化运营和高质量服务,赢得了客户及社会的一致认可和好评。本公司主要从事360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统领域内的360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统等产品的研究开发。拥有一支研发能力强、成果丰硕的技术队伍。公司先后与行业上游与下游企业建立了长期合作的关系。依托成熟的产品资源和渠道资源,向全国生产、销售360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统产品,经过多年的沉淀和发展已经形成了科学的管理制度、丰富的产品类型。广州精拓电子科技有限公司以先进工艺为基础、以产品质量为根本、以技术创新为动力,开发并推出多项具有竞争力的360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统产品,确保了在360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统市场的优势。