瑞士洛桑联邦理工学院科研团队在《自然·通讯》期刊上发表了一项关于可分离机械手的研究。该机械手可通过不同手指组合实现灵活抓握,并可脱离机身在狭窄空间中自主移动执行任务 [6]。2026年1月13日,智元机器人关联公司智元创新(上海)科技股份有限公司的“机械手”外观设计专利获授权。该设计用于智能机器人的...
工业机器人基本参数
- 品牌
- 翔富
- 型号
- 齐全
工业机器人企业商机
驱动系统驱动系统负责为机器人各关节提供动力支持,通常由电机、减速机构和传动部件等组成,其性能对机器人的速度响应、运动平稳性和定位精度具有重要影响。控制系统是工业机器人的**组成部分,主要用于执行程序指令、协调各关节运动以及管理输入输出信号,实现对机器人运动轨迹、姿态和作业流程的统一控制 [29]。感知系统感知系统用于获取机器人本体状态及作业环境信息,包括位置、速度、力或外部环境特征等数据,为控制系统提供反馈依据。通过传感信息的引入,工业机器人能够在复杂工况下保持稳定运行,并在一定程度上实现对作业过程的调整与优化。末端执行器是工业机器人直接与工件或工具接触的部件,其形式根据作业任务不同而有所差异,如夹持器、焊枪、喷枪或**工装等,是实现具体工业操作的重要接口 [29]。工业机器人是近几十年发展起来的一种高科技自动化生产设备。无锡质量工业机器人私人定做

按驱动方式可分为液压式、气动式、电动式、机械式。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。机械手主要由执行机构、驱动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等**运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般**机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的**通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。锡山区质量工业机器人批量定制采用低能耗驱动技术与环保材料,降低生产过程碳排放。
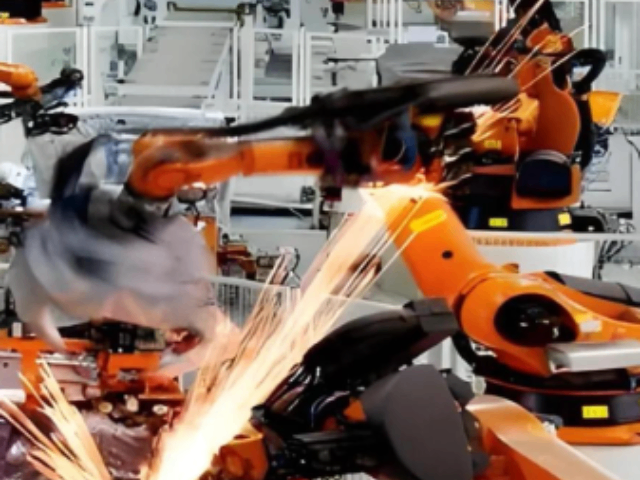
作为现代制造体系中的基础装备,工业机器人在全球范围内的应用已从传统的装配线搬运和弧焊等场景扩展至分拣、检测、码垛、机床自动上下料等更复杂的工业作业任务。工业机器人已在汽车、电子、冶金、轻工、石化、医药等52个行业大类、143个行业中类广泛应用 [26]。与传统固定自动化设备相比,工业机器人在作业柔性化、灵活性和适应程度等方面具有***优势,并能通过末端执行器的更换和程序调整快速切换作业任务,适应多品种、小批量生产模式的制造需求 [23]。
20世纪60年代,工业机器人发展迎来黎明期,机器人的简单功能得到了进一步的发展。机器人传感器的应用提高了机器人的可操作性,包括恩斯特采用的触觉传感器;托莫维奇和博尼在世界上**早的“灵巧手”上用到了压力传感器;麦卡锡对机器人进行改进,加入视觉传感系统,并帮助麻省理工学院推出了世界上***个带有视觉传感器并能识别和定位积木的机器人系统。此外,利用声呐系统、光电管等技术,工业机器人可以通过环境识别来校正自己的准确位置。 [6]通过PLC或控制器解析程序指令,驱动关节协同运动,支持点位控制(如机床上下料)或连续轨迹控制。

澳大利亚亿万富翁、矿业巨头Fortescue掌舵人安德鲁·弗雷斯特在访问中国后,放弃进军制造电动汽车动力系统的尝试。弗雷斯特对媒体说:“我现在就可以带你去中国的工厂看看,你会看见一个巨大的传送带,机器人在组装零件。沿着这条传送带走大概八九百米后,你会看见一辆卡车开了出来。全程没有人,一切都是机器人在操作。”英国一家能源公司老板格雷格·杰克逊回忆说:“工厂里全是机器人,甚至不需要开灯。我们参观了一家生产手机的工厂,整个过程自动化程度很高,生产线上没有工人,只有很少的人在那里确保工厂正常工作。” [21]电子厂中机器人与工人共同完成零件装配。新吴区新一代工业机器人五星服务
精确度和一致性:机器人能够以高精度执行重复性任务,减少人为错误,确保产品质量的一致性。无锡质量工业机器人私人定做
基本组成工业机器人通常由三大部分六个子系统组成。三大部分是机械部分、传感部分和控制部分。六个子系统可分为机械结构系统、驱动系统、感知系统、机器人-环境交互系统、人机交互系统和控制系统。机械结构系统从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两个**的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。并联机构有两个构成部分,分别是手腕和手臂。手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但反解十分困难;而并联机器人则相反,其正解困难,反解却非常容易 [29]。无锡质量工业机器人私人定做
无锡翔富自动化设备有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的通信产品中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同翔富供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
与工业机器人相关的文章
梁溪区什么是工业机器人五星服务
- 惠山区本地工业机器人服务热线 2026-05-15
- 江阴什么是工业机器人供应商家 2026-05-15
- 江苏附近工业机器人价目表 2026-05-15
- 宜兴新一代工业机器人销售 2026-05-15
- 宜兴质量工业机器人厂家直销 2026-05-15
- 徐州什么是工业机器人量大从优 2026-05-15
- 新吴区质量工业机器人销售 2026-05-15
- 常州新一代工业机器人服务热线 2026-05-15
- 滨湖区本地工业机器人批量定制 2026-05-15
- 滨湖区新一代工业机器人量大从优 2026-05-15
- 惠山区什么是工业机器人销售厂家 2026-05-15
- 宜兴附近工业机器人五星服务 2026-05-15
与工业机器人相关的产品
与工业机器人相关的新闻
-
江苏质量工业机器人批量定制 2026-05-14 21:10:10机器人-环境交互系统机器人-环境交互系统是实现机器人与外部环境中的设备相互联系和协调的系统。机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等。当然也可以是多台机器人集成为一个去执行复杂任务的功能单元 [29]。人机交互系统人机交互系统是人与机器人进行联系和参与机器人控制的装置...
-
锡山区附近工业机器人推荐货源 2026-05-14 04:09:342023年12月,记者走访西安国际港务区西安港科创产业园(达升西部工业机器人产业示范基地),该区域的工业机器人产业规模已达百亿级别。 [10]随着制造业向数字化、网络化和智能化方向持续演进,工业机器人在未来工业体系中的作用将进一步增强。从装备层面看,工业机器人不再*作为单一作业设备存在,而是逐步融入...
-
无锡质量工业机器人销售方法 2026-05-14 20:09:30基本组成工业机器人通常由三大部分六个子系统组成。三大部分是机械部分、传感部分和控制部分。六个子系统可分为机械结构系统、驱动系统、感知系统、机器人-环境交互系统、人机交互系统和控制系统。机械结构系统从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴...
-
宜兴什么是工业机器人现货 2026-05-14 17:09:06发展现状2020年,中国机器人产业营业收入***突破1000亿元。“十三五”期间,工业机器人产量从7.2万套增长到21.2万套,年均增长31%。从技术和产品上看,精密减速器、高性能伺服驱动系统、智能控制器、智能一体化关节等关键技术和部件加快突破、创新成果不断涌现,整机性能大幅提升、功能愈加丰富,产品...
与工业机器人相关的问题
新闻资讯
产品推荐
-

宜兴质量工业机器人厂家直销
2026-05-15 -
徐州什么是工业机器人量大从优
2026-05-15 -

江阴什么是可穿戴智能设备批量定制
2026-05-15 -
江苏附近可穿戴智能设备直销价
2026-05-15 -

新吴区质量工业机器人销售
2026-05-15 -

宜兴质量可穿戴智能设备推荐货源
2026-05-15 -
常州新一代工业机器人服务热线
2026-05-15 -
梁溪区新一代可穿戴智能设备销售
2026-05-15 -
常州附近可穿戴智能设备现货
2026-05-15