- 品牌
- 度风
- 型号
- 齐全
雷达天线对电磁能量在方向上的聚集能力用波束宽度来描述,波束越窄,天线的方向性越好。但是在设计和制造过程中,雷达天线不可能把所有能量全部集中在理想的波束之内,在其它方向上在在着泄漏能量的问题。能量集中在主波束中,我们常常形象地把主波束称为主瓣,其它方向上由泄漏形成旁瓣。为了覆盖宽广的空间,需要通过天线的机械转动或电子控制,使雷达波束在探测区域内扫描。概括起来,雷达的技术参数主要包括工作频率(波长)、脉冲重复频率、脉冲宽度、发射功率、天线波束宽度、天线波束扫描方式、接收机灵敏度等。测距测速雷达在现代科技中扮演着重要角色,广泛应用于交通、航空等多个领域。常熟质量毫米波测距测速雷达优势

2. 雷射二极管以小于十亿分之一秒的瞬间切换开关,**提高精确度。3. 雷射二极管发射率很窄,其侦测器极易接收到精确的波长;因此在日间有强烈阳光时,仍能正常操作。4. 雷射二极管只发射电磁光谱中的红外线部分;而红外线系眼睛看不见的,不会影响驾驶人的注意力。雷射测速***以量测红外线光波传送时间来决定速度。由于光速是固定,激光脉冲传送到目标再折返的时间会与距离成正比。以固定间隔发射两个脉冲,即可测得两个距离;将此二距离之差除以发射时间间隔即可得到目标的速度。理论上,发射两次脉冲即可量测速度;实务上,为避免错误,一般雷射测速器(***)在瞬间发射高达七组的脉冲波,自以**小平方法求其平均值,去计算目标速度。姑苏区附近毫米波测距测速雷达设计在生产线中用于物体检测、定位和测量,提高生产效率和安全性。

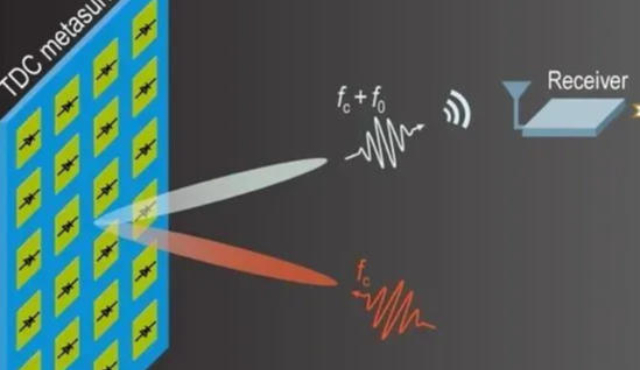
薄膜铌酸锂光子毫米波雷达芯片是由南开大学与香港城市大学于2025年联合研制的毫米波雷达芯片,基于4英寸薄膜铌酸锂平台设计,兼容CMOS工艺。该芯片通过集成倍频模块与回波去斜模块,实现了厘米级距离与速度探测分辨率,并在逆合成孔径雷达二维成像中达到高精度。研究成果发表于2025年1月27日的《自然·光子学》杂志。 [1-2]研究团队通过优化薄膜铌酸锂制备工艺,在单一芯片上完成毫米波信号生成、处理与接收全流程,实验验证了其精细测距、测速及成像能力。该技术利用薄膜铌酸锂的电光调制特性,突破传统电子雷达的带宽与频率限制,推动集成光子雷达系统在分辨率与小型化方面的发展。其应用场景涵盖6G通信、智能驾驶等领域,为高精度目标探测提供技术支撑。
测定目标的运动速度是雷达的一个重要功能,雷达测速利用了物理学中的多普勒原理:当目标和雷达之间存在着相对位置运动时,目标回波的频率就会发生改变,频率的改变量称为多普勒频移,用于确定目标的相对径向速度,通常,具有测速能力的雷达,例如脉冲多普勒雷达,要比一般雷达复杂得多。雷达的战术指标主要包括作用距离、威力范围、测距分辨力与精度、测角分辨力与精度、测速分辨力与精度、系统机动性等。其中,作用距离是指雷达刚好能够可*发现目标的距离。布置于车辆四角,覆盖侧向及后方盲区,提供盲点监测(BSD)、变道辅助(LCA)功能。

它取决于雷达的发射功率与天线口径的乘积,并与目标本身反射雷达电磁波的能力(雷达散射截面积的大小)等因素有关。威力范围指由比较大作用距离、**小作用距离、比较大仰角、**小仰角及方位角范围确定的区域。雷达的技术指标与参数很多,而且与雷达的体制有关,这里**讨论那些与电子对抗关系密切的主要参数。根据波形来区分,雷达主要分为脉冲雷达和连续波雷达两大类。当前常用的雷达大多数是脉冲雷达。常规脉冲雷达周期性地发射高频脉冲。相关的参数为脉冲重复周期(脉冲重复频率)、脉冲宽度以及载波频率。载波频率是在一个脉冲内信号的高频振荡频率,也称为雷达的工作频率。固定式雷达:通常安装在特定位置,用于监测特定区域。昆山本地毫米波测距测速雷达质量
4D雷达点云与视觉图像对齐,解决纯视觉方案在低光照下的误判问题。常熟质量毫米波测距测速雷达优势
2025年1月,从南开大学获悉,南开大学携手香港城市大学,成功研制出薄膜铌酸锂光子毫米波雷达芯片,在毫米波雷达领域取得重大突破。这一创新成果,为未来6G通信、智能驾驶、精细感知等前沿领域的应用奠定了坚实基础。 [1研究团队成员、南开大学教授朱厦说,该芯片基于兼容CMOS工艺的4英寸薄膜铌酸锂平台设计,实现了厘米级距离与速度探测分辨率,并在逆合成孔径雷达(ISAR)二维成像方面展现出***的精度,该成果1月27日发表在《自然·光子学》杂志上。这一创新成果有效突破了传统电子雷达在低频段窄带宽上的技术瓶颈,推动集成光子毫米波雷达系统在分辨率、灵活性、适用性和集成度方面迈上新台阶。常熟质量毫米波测距测速雷达优势
苏州度风科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的通信产品中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同度风供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
从 20 世纪 80 年代中期开始,由于集成电路技术的广泛应用和迅猛发展,毫米波雷达系统的集成度和性能有了大幅度的提升,降低了其造价成本且使其体积变小,这就使得毫米波雷达更加能够应用于车载领域,与此同时世界各国都在这个时候相继启动智能交通系统计划(ITS),为车载毫米波雷达在汽车防撞系统的应用提供了不竭的动力源泉,比如由德国的奔驰汽车公司发起的“普罗米修斯”计划得到了在欧洲各国汽车公司和相关的研究所的积极响应,从而推动了汽车雷达防撞系统的研究工作;固定式雷达:通常安装在特定位置,用于监测特定区域。姑苏区特种毫米波测距测速雷达厂家电话除了按用途分,还可以从工作体制对雷达进行区分。这里就对一些新体...
- 苏州信息化毫米波测距测速雷达现货 2026-04-26
- 虎丘区智能化毫米波测距测速雷达厂家直销 2026-04-26
- 太仓国内毫米波测距测速雷达批量定制 2026-04-26
- 虎丘区本地毫米波测距测速雷达报价 2026-04-26
- 吴中区本地毫米波测距测速雷达厂家电话 2026-04-26
- 工业园区智能化毫米波测距测速雷达供应 2026-04-26
- 昆山国内毫米波测距测速雷达推荐厂家 2026-04-26
- 常熟智能化毫米波测距测速雷达优势 2026-04-26
- 苏州耐用毫米波测距测速雷达价钱 2026-04-26
- 太仓信息化毫米波测距测速雷达质量 2026-04-26


- 虎丘区特种毫米波测距测速雷达报价 2026-04-25
- 工业园区耐用毫米波测距测速雷达供应 2026-04-25
- 太仓特种毫米波测距测速雷达厂家供应 2026-04-25
- 昆山耐用毫米波测距测速雷达质量 2026-04-25
- 相城区质量毫米波测距测速雷达批量定制 2026-04-25
- 高新区耐用毫米波测距测速雷达厂家直销 2026-04-25




- 苏州信息化毫米波测距测速雷达现货 04-26
- 相城区智能化毫米波通信推荐厂家 04-26
- 昆山信息化毫米波通信报价 04-26
- 吴江区附近毫米波测风雷达厂家供应 04-26
- 虎丘区智能化毫米波测距测速雷达厂家直销 04-26
- 高新区国内毫米波测风雷达厂家直销 04-26
- 相城区国内毫米波通信厂家电话 04-26
- 太仓国内毫米波测距测速雷达批量定制 04-26
- 张家港国内毫米波测风雷达厂家电话 04-26
- 高新区国内毫米波测风雷达报价 04-26