- 品牌
- 度风
- 型号
- 齐全
技术参数是根据雷达的战术性能与指标要求来选择和设计的,因此它们的数值在某种程度上反映了雷达具有的功能。例如,为提高远距离发现目标能力,预警雷达采用比较低的工作频率和脉冲重复频率,而机载雷达则为减小体积、重量等目的,使用比较高的工作频率和脉冲重复频率。这说明,如果知道了雷达的技术参数,就可在一定程度上识别出雷达的种类。雷达的用途***,种类繁多,分类的方法也非常复杂。通常可以按照雷达的用途分类,如预警雷达、搜索警戒雷达、无线电测高雷达、气象雷达、航管雷达、引导雷达、炮瞄雷达、雷达引信、战场监视雷达、机载截击雷达、导航雷达以及防撞和敌我识别雷达等。利用60GHz频段检测微动(呼吸、心跳),防止儿童/宠物被锁车内,并监控驾驶员疲劳状态。太仓智能化毫米波测距测速雷达厂家供应

汽车防碰撞技术首先需要解决的问题是汽车之间的安全距离。汽车与汽车之间的距离小于安全距离,就应该能够自动报警,并采取制动措施。目前,测定汽车之间安全距离的方法有三种:超声波测距、毫米波雷达测距和激光测距,防撞雷达系统装配在车辆的前方、侧方或者后方,完成前视防撞(防追尾碰撞)、侧视防撞(防更换车道时两车相撞)和后视防撞(防倒车时与车后阻碍物相撞)等侧重点各异的功能。主要功能:防撞预警,辅助停车,盲点探测等,为完成上述功能所应达到的技术要求是系统应具有测距、测速、测角的功能。虎丘区信息化毫米波测距测速雷达供应毫米波窗口频段宽(如35GHz、94GHz大气窗口),支持宽频带扩频与跳频设计,有效抵御电子干扰。

5、雷达测速仪发射波束的张角是一个很重要的技术指标。张角越大,测速准确率越易受影响;反之,则影响较小。6、测速雷达如果天线放置不当,当地势为非平原状态时,会使目标车的读数被其它车的速度代替。7、如果目标旁边有反射能力更强的物体存在,测速雷达也只能测到反射能力强的物体。8、当有两车并行时,雷达测速仪无法分辨出哪一辆车是超速车辆。9、当测量信号经过多次反射后,测速雷达测出的结果也会出错。10、无线电波会对测速雷达产生干扰,使测量结果失真。11、雷达感应器可以侦察到雷达测速仪却极难侦察到激光测速仪的存在。
雷达差别在于它们各自占据的频率和波长不同。其原理是雷达设备的发射机通过天线把电磁波能量射向空间某一方向,处在此方向上的物体反射碰到的电磁波;雷达天线接收此反射波,送至接收设备进行处理,提取有关该物体的某些信息(目标物体至雷达的距离,距离变化率或径向速度、方位、高度等)。测量距离实际是测量发射脉冲与回波脉冲之间的时间差,因电磁波以光速传播,据此就能换算成目标的精确距离。测量目标方位是利用天线的尖锐方位波束测量。测量仰角靠窄的仰角波束测量。根据仰角和距离就能计算出目标高度。支持200-300米长距离探测,实现自适应巡航(ACC)、自动紧急制动(AEB)与前向碰撞预警(FCW)。

在一九六二年的实验中发现,从地球发射的雷射光在经过近四十万公里的太空之旅后,只在月球表面上投射出一片约三公里直径大小的圆而已!此特性使得雷射在焊接、切割、雕刻、穿洞等加工与医学(眼科、牙科、**)应用更为***。测速雷射种类于固态雷射中的半导体雷射。雷射测速设备采用红外线半导体雷射二极管。雷射二极管有几个特点使它极适合用来量测速度:1. 雷射二极管自微小范围中发射出极窄的光束,此一狭窄光束才能精确地瞄准目标。毫米波雷达能够提供厘米级的测距精度,适合对小型目标进行精确测量。张家港特种毫米波测距测速雷达质量
4D雷达点云与视觉图像对齐,解决纯视觉方案在低光照下的误判问题。太仓智能化毫米波测距测速雷达厂家供应
毫米波测距测速雷达是一种利用毫米波(通常指频率在30 GHz到300 GHz之间的电磁波)进行目标测距和测速的雷达系统。这种雷达技术具有高精度、高分辨率和抗干扰能力强等优点,广泛应用于交通监控、无人驾驶、工业自动化、安防监控等领域。主要特点:高精度:毫米波雷达能够提供厘米级的测距精度,适合对小型目标进行精确测量。高分辨率:由于波长较短,毫米波雷达可以实现更高的空间分辨率,能够区分相邻的多个目标抗干扰能力:毫米波雷达对环境的适应性强,能够在雨、雾、雪等恶劣天气条件下正常工作。太仓智能化毫米波测距测速雷达厂家供应
苏州度风科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在江苏省等地区的通信产品中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,度风供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!

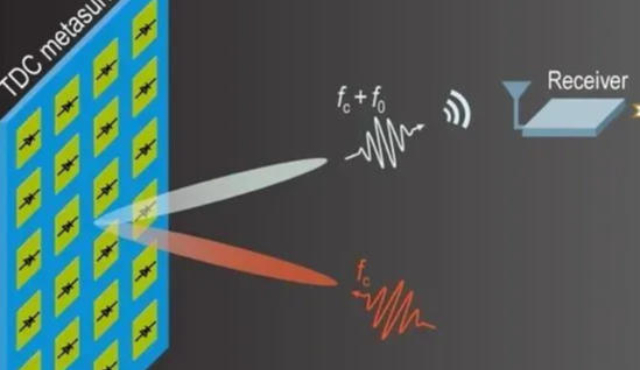
2025年1月,从南开大学获悉,南开大学携手香港城市大学,成功研制出薄膜铌酸锂光子毫米波雷达芯片,在毫米波雷达领域取得重大突破。这一创新成果,为未来6G通信、智能驾驶、精细感知等前沿领域的应用奠定了坚实基础。 [1研究团队成员、南开大学教授朱厦说,该芯片基于兼容CMOS工艺的4英寸薄膜铌酸锂平台设计,实现了厘米级距离与速度探测分辨率,并在逆合成孔径雷达(ISAR)二维成像方面展现出***的精度,该成果1月27日发表在《自然·光子学》杂志上。这一创新成果有效突破了传统电子雷达在低频段窄带宽上的技术瓶颈,推动集成光子毫米波雷达系统在分辨率、灵活性、适用性和集成度方面迈上新台阶。便携式雷达:可以手持...
- 工业园区质量毫米波测距测速雷达厂家电话 2026-05-02
- 工业园区特种毫米波测距测速雷达现货 2026-05-02
- 太仓智能化毫米波测距测速雷达质量 2026-05-02
- 吴江区附近毫米波测距测速雷达推荐厂家 2026-05-02
- 吴江区本地毫米波测距测速雷达质量 2026-05-01
- 张家港本地毫米波测距测速雷达厂家直销 2026-05-01
- 江苏耐用毫米波测距测速雷达推荐厂家 2026-05-01
- 虎丘区附近毫米波测距测速雷达厂家电话 2026-05-01
- 常熟智能化毫米波测距测速雷达质量 2026-05-01
- 常熟特种毫米波测距测速雷达厂家电话 2026-05-01
- 虎丘区智能化毫米波测距测速雷达质量 2026-04-30
- 工业园区附近毫米波测距测速雷达质量 2026-04-30
- 吴江区质量毫米波测距测速雷达供应 2026-04-30
- 虎丘区质量毫米波测距测速雷达优势 2026-04-30
- 姑苏区附近毫米波测距测速雷达推荐厂家 2026-04-30
- 常熟智能化毫米波测距测速雷达供应 2026-04-30




- 虎丘区国内毫米波通信费用 05-02
- 姑苏区信息化毫米波测距测速雷达推荐厂家 05-02
- 工业园区质量毫米波测距测速雷达厂家电话 05-02
- 常熟特种毫米波测风雷达厂家电话 05-02
- 工业园区特种毫米波测距测速雷达现货 05-02
- 江苏智能化毫米波通信推荐厂家 05-02
- 吴江区信息化毫米波测风雷达厂家供应 05-02
- 虎丘区信息化毫米波通信推荐厂家 05-02
- 高新区本地毫米波测风雷达费用 05-02
- 太仓智能化毫米波测距测速雷达质量 05-02