激光雷达是一种基于激光脉冲和接收回波信号的高精度感知技术。它以瞬间的速度和精细的数据采集,突破了传统传感器的限制,实现对环境的多方位探测与识别。无论是自动驾驶、智能机器人,还是智慧城市、工业制造等领域,激光雷达都扮演着不可或缺的角色。激光雷达的工作原理简单却高效。通过发射激光束并接收回波信号,它能够...
激光雷达基本参数
- 品牌
- 慧视科技
- 型号
- 可定制
激光雷达企业商机
半导体泵浦固体激光器综合了半导体激光器与固体激光器的优点,具有体积小、重量轻、量子效率高的特点。通过泵浦激光T作物质,输出光束质量好、时间相干性和空间相干性好的泵浦光,摒弃了半导体激光器光束质量差、模式特性荠的缺点,与氙灯泵浦同体激光器相比具有泵浦效率高、T作寿命长、稳定可靠的优点。激光工作物质可以选择钕(Nd)、铥(Tm)、钬(Ho)、铒(Er)、镱(Yb)、锂(Li)、铬(Cr)等,获得从1.047~2.8μm的多种波。目前,半导体泵浦固体激光器的许多工程应用问题已经得到解决,是应用前景比较好、发展快的一种激光器。气体激光器是目前种类较多、输出激光波长丰富、应用广的一种激光器。其特点是激光输出波长范围较宽;气体的光学均匀性较好,因此输出的光束质量好,其单色性、相干性和光束稳定性好。通过这四种技术的集成可以快速的完成地面三维空间地理信息的采集,经过处理可得到具有坐标信息的影像数据。成都2D激光雷达测距

自动驾驶感知方案分为轻硬件重算法的视觉方案和以激光雷达为主的 多传感器融合方案。当前汽车制造商正在为车配备各种先进的控制和传 感功能,例如碰撞警告、避让系统、盲点监视器、车道保持辅助、车道 偏离警告、自适应巡航控制等等是一些成熟的驾驶辅助案例,使驾驶体 验更安全、更轻松。对于自动驾驶通常有纯视觉和多传感器融合两种路 径:特斯拉坚持纯视觉方案,采用来自多个摄像头的图像通过神经网络 进行分析,利用海量数据来做出关于加速、制动和转向的决定,特点为 轻传感器重算法。其他厂商均采用激光雷达、相机、毫米波雷达多传感器融合方案提升安全性能,特点是重硬件轻软件。激光雷达、毫米波雷 达、超声波传感器和摄像头各有优缺点。高度自动驾驶和完全自动驾驶 的车辆需要多传感器融合,能在各种天气和照明条件下创建精确的车辆 周围环境感知以及长短距离地图。四川防撞激光雷达传感器通过分析便可得到待测对象的浓度分布。

可以通过反射信号和发射信号的频率是否相同判断物体是否处于静止状态。对于逐渐靠近的物体,返回信号会产生正向多普勒频移,对于逐渐远离的物体,返回信号会产生反向多普勒频移,导致频率发生上移或下移并由此区分物体移动方向。目前TOF为市场中**为成熟的激光雷达测距方式,也是商业化激光雷达应用多的测距方式。通过监测激光发射与回波的时间差,基于光速和测量时间差计算目标距离。TOF的比较大优势在于探测精确、性价比高、技术成熟、响应速度快。缺陷是需要算法抗干扰,并根据反射率判断是否为伪目标,所以对算法有较高的要求。FMCW可以根据多普勒效应判断目标移动方向,信息更丰富且对环境强光和其他激光具有很好的抗干扰性能。总体来看测距方式未来将从TOF逐渐向FMCW切换,且两种测距方式将会在不同场景存留。
自动驾驶由感知、预测、规划、控制四大关键部分组成。首先通过各类 传感器获得相机图像、激光雷达点云等周围原始数据,得到车道、可驾 驶区域、运动物体和交通信号等信息,之后预测移动障碍物的意图和轨 迹,并根据获得的信息优化车辆的路线和行动,控制车辆完成加速、 减速、转向等动作来跟随规划路径。激光雷达在自动驾驶中属于感知部 分的重要信息输入来源。自动驾驶按照车辆自动化程度分为 6 个等级,L3 级之后在使用自动驾 驶功能时驾驶员无需驾驶汽车。一个波长调到待测物体的吸收线,而另一波长调到线上吸收系数较小的边翼。

在自动驾驶的早期研发阶段,传感器的标定还未形成高效的模式,主要的几种标定方式有轮廓对齐、环境重建等方式,但这些方式不是准确性不理想,就是对环境的要求过高,有的需要在户外进行长时间的实验,标定效率低。随着自动驾驶进入量产阶段,这类标定方法将不再适用,业内需要的是高效、准确的标定模式——标定车间。标定车间是一个高度定制化的场地,主要由标定标志物、标定平台、照明设备组成。标定标志物目前主要指标定板,包括棋盘格标定板、ArUco标定板、圆形网格标定板、ChArUco标定板等。企业可根据采用的算法选择不同类型的标定板,有些企业也采用屏幕显示标定板的方式进行标定。激光雷达可应用于油气直接勘察。西藏agv激光雷达电子狗
可以采用非相干的能量接收方式。成都2D激光雷达测距
转镜扫描结构有单轴镜和双轴镜,体积小于纯机械式,当前应用较多。这种扫描架构的优点是收发系统固定在整个雷达模块里,旋转 模块比较小,能够极大的减少体积,压缩成本。同时由于重量较轻, 电机轴承负荷小,使得运行更加稳定,寿命更长,更容易满足车规 需求。波长方面同时存在 905nm 和 1550nm 技术路径。当下采用 1550nm 和双轴镜扫描方案的主要为 Luminar 和图达通,均为行 业前列高性能激光雷达厂商,产品在 10%理想散射的状态下具有 250m 探测距离以及优于 0.1 度角分辨率的超高性能。图达通高性 能激光雷达已标配上车蔚来部分车型,目前已经交付了近 2000 辆。成都2D激光雷达测距
成都慧视光电技术有限公司是一家成都慧视光电技术有限责任公司是一家立足于新技术研发的高新技术企业,具有完全自主知识产权,其团队由在图像处理与人工智能领域沉淀了近十年的人员组成,主营行业:追踪板卡类、激光雷达类、红外测温类整机及模组、观瞄类整机、行业AI解决方案、通信传输类产品及方案!的公司,致力于发展为创新务实、诚实可信的企业。公司自创立以来,投身于电子元器件,光电子器件,通讯设备,仪器仪表,是通信产品的主力军。慧视光电始终以本分踏实的精神和必胜的信念,影响并带动团队取得成功。慧视光电始终关注自身,在风云变化的时代,对自身的建设毫不懈怠,高度的专注与执着使慧视光电在行业的从容而自信。
与激光雷达相关的文章

地面激光雷达批发
- 昆明大角度测量激光雷达避障 2024-04-19
- 西藏无人机激光雷达数据处理 2024-04-19
- 重庆32线激光雷达生产商 2024-04-19
- 贵州国内激光雷达避障 2024-04-18
- 贵州大角度测量激光雷达原理 2024-04-18
- 高帧率 激光雷达公司 2024-04-18
- 重庆汽车激光雷达生产商 2024-04-18
- 西藏气溶胶激光雷达企业 2024-04-17
- 四川高帧率 激光雷达企业 2024-04-17
- 贵州16线激光雷达价格 2024-04-16
- 成都三维激光雷达避障 2024-04-16
- sick激光雷达厂家批发 2024-04-16
与激光雷达相关的产品




与激光雷达相关的新闻
-
云南国内激光雷达数据处理 2024-04-14 19:02:04随着现代信息社会的发展,人民的生活水准也在不断提升,因而对安全的需求也越来越迫切。由于近些年来铁路上事故频发,铁路上的安全成为一个研发热点,通过激光雷达的不间断扫描来获取轨道上的3D图像,进而判断是否存在安全隐患。在该项目领域,慧视光电开发的三维激光雷达摆脱了现有市场上探测分辨率、扫描速度等技术参数...
-
贵州车用激光雷达厂家 2024-04-14 14:01:45气候对我们的生活影响很大,其中大气风场作为气象学和天气学研究领域重要的参数,会影响我们的日常出行。因大气风场异常造成的航空安全事件屡见不鲜。相干激光测风雷达是利用大气运动产生的多普勒效应进行三维风场探测的新型遥感设备,可以实现从地面到对流层高度无盲区的大气参数观测,具有高精度、高分辨率、大探测范围等...
-
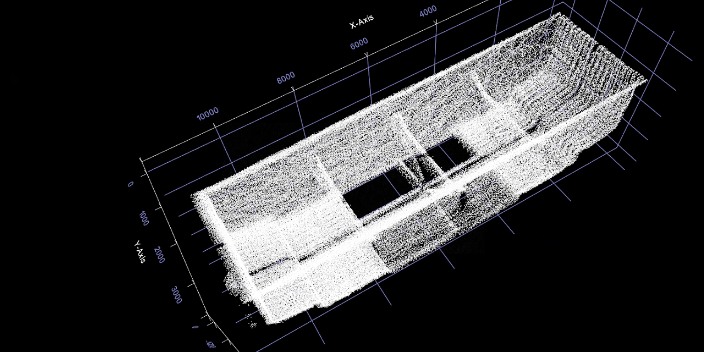
四川3D激光雷达价格 2024-04-14 14:01:45成都慧视光电的HSLi-H20VF激光雷达测量系统,是一款基于激光雷达和可视图像融合的3D测量产品。该产品基于激光雷达模块和内置高分辨率相机,可高精度,高密度,实时地生成彩色激光点云。相机模块设有变焦镜头,结合激光点云的距离信息,有利于在整个视野范围内对目标物进行变倍放大识别,提高激光雷达系统的测量...
-
贵阳ip67防水激光雷达测距原理 2024-04-14 04:02:54激光雷达通过激光收发,能够扫描获取目标、目标区域的3D点云图,从而有着广泛的应用。慧视光电开发的三维激光雷达凭借探测范围宽、分辨率高、响应速度快、点云密集等特点,受到了市场青睐。在制造业领域的4.0转变发展中,激光雷达能够辅助工业机器人进行自动化工作,在生产过程中,激光雷达能够帮助机器人对输送设备上...
与激光雷达相关的问题
新闻资讯
产品推荐
-
上海国产目标检测售后服务
2026-05-15 -

山东工业目标检测解决
2026-05-15 -

山西人防目标检测生产企业
2026-05-15 -
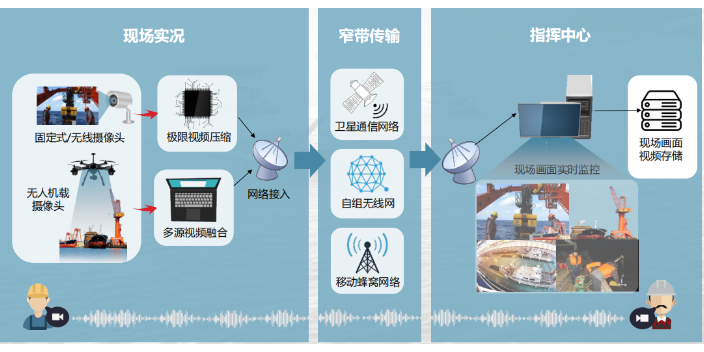
江西窄带视频压缩与传输专业方案
2026-05-15 -

四川高性能目标检测
2026-05-15 -
吉林高清视频压缩与传输森林
2026-05-15 -

湖南流畅目标检测设备
2026-05-15 -
北京无源目标检测销售厂家
2026-05-15 -

安徽专业视频压缩与传输
2026-05-15