佳兴伟诚360全景盲区监测系统专为挖掘机设计,有效解决传统作业中的视野盲区问题。系统通过安装在机身四周的4-6个高清摄像头,实时捕捉挖掘机周围环境影像。经过智能图像处理技术,在驾驶室内显示屏上呈现完整的360度俯视画面。操作手可以清晰看到动臂后方、履带两侧、配重尾部等传统盲区的情况。特别是在狭窄工地作业时,系统能显示挖掘机与周边障碍物的距离,避免碰撞事故。当有人员或设备进入危险区域时,系统会自动发出声光报警,提醒操作手注意。这套系统提升了挖掘机在复杂环境下的作业安全性,减少了90%以上的盲区事故。对于大型车辆而言,360 全景盲驾驶辅助系统大幅减小盲区范围,降低事故风险。乌兰察布装载车盲区360全景方案

地下矿用铲运机在狭窄巷道作业时,巷道宽度能容纳车身,两侧岩壁与铲运机的间隙形成致命盲区,易碰撞巷道支护或行走的矿工。佳兴伟诚为其设计的系统,将 360 全景摄像头与超声波雷达集成在铲运机车身四周。铲运机转弯时,雷达扫描 5 米内的巷道壁和人员,摄像头实时拼接巷道全景,若与岩壁距离小于 0.5 米,系统发出急促警报,同时在画面中用红色线条标注危险边界;当矿工在盲区行走,雷达通过人体反射波锁定,摄像头的红外功能在无照明巷道内清晰显示人员轮廓,双重提示驾驶员减速,避免巷道内的碰撞事故。秦皇岛消防车360全景定制工程车360 全景驾驶辅助系统的操作极为简便,驾驶员能快速上手,无需复杂学习。
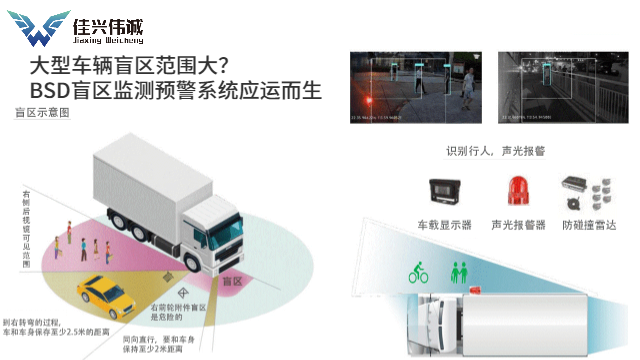
在工程建设领域,工程车的安全运营始终是重中之重,而盲区则是导致事故的 关键因素。工程车 360 全景盲区监测预警系统的出现,正是为了解决这一难题。对于体型庞大的工程车而言,驾驶员的视野存在诸多局限,车头下方、车身侧面、车尾等位置的盲区极易隐藏行人、小型车辆或障碍物,稍有不慎就可能引发碰撞事故。尤其是在建筑工地、矿山、港口等复杂作业环境中,人员与车辆混合作业频繁,盲区风险更是被放大。这套系统通过分布在车辆四周的高清摄像头,实时采集各个方位的画面,经过算法处理后形成一幅完整的 360 度全景影像,直观地呈现在驾驶室内的显示屏上,让驾驶员能够清晰掌握车辆周围 360 度的实时状况,就像拥有了 “上帝视角”,从根源上减少因视线盲区导致的安全隐患。
环卫清洁车在城市环境维护中扮演着至关重要的角色,它们不辞辛劳地清扫街道、收集垃圾,为城市的整洁美丽付出努力。然而,由于环卫清洁车车身较大,存在众多盲区,在作业和行驶过程中极易引发安全事故,对环卫工人、其他道路使用者的生命安全构成威胁。为了有效解决这一问题,360 全景盲区预警系统应运而生,成为提升环卫清洁车安全性的关键技术。 360 全景盲区预警系统主要基于多个摄像头和先进的图像算法。在环卫清洁车的车身四周,包括车头、车尾、两侧后视镜下方等位置,安装多个高清摄像头。这些摄像头实时采集车辆周围的图像信息,并将其传输至中心处理器。中心处理器通过图像拼接算法,将各个摄像头的画面整合为一个完整的 360 度全景图像,呈现在驾驶室内的显示屏上。同时,系统利用图像识别技术,对车辆周围的物体进行检测和分析。当检测到有行人、车辆或其他障碍物进入盲区时,系统会根据距离和危险程度,及时发出不同级别的预警信号,如声音警报、屏幕闪烁提示等,提醒驾驶员注意潜在的危险。360 全景盲区驾驶辅助系统,将车辆周围景象无死角呈现,助力驾驶员掌控盲区内状况。
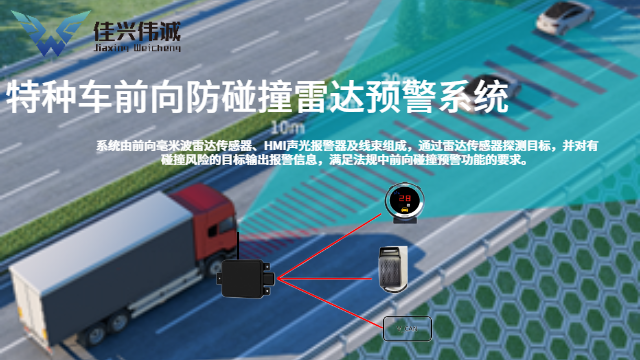
在重型工程机械主宰的复杂作业现场,巨大的车身结构天然形成了无数视觉死角,这些“盲区”如同潜伏的危机,时刻威胁着设备操作员、现场工作人员及周边环境的安全。工程车360全景全景盲区监测预警系统应运而生,它并非简单的影像拼接,而是一套融合感知技术与智能算法的主动安全解决方案。该系统通过环绕车身部署的高分辨率超广角鱼眼摄像头,结合先进的图像拼接、畸变校正与实时渲染算法,在驾驶室内的显示屏上无缝呈现车辆周围360度的“上帝视角”,彻底消除传统后视镜和驾驶员肉眼无法覆盖的视觉盲区。其关键价值在于将“被动观察”升级为“主动预警”,通过毫米波雷达或超声波传感器探测进入危险区域的动态与静态障碍物,并依据碰撞风险等级即时触发分级的声光警报(如蜂鸣、语音提示、屏幕闪烁、区域高亮),为操作员提供宝贵的决策与反应时间。这不是技术上的突破,更是工程机械安全文化的一次深刻变革,明显提升了作业现场的本质安全水平。佳兴伟诚 360 全景系统的连接线束采用耐高低温材料,在极端温度环境下仍能保持良好性能。乌兰察布装载车盲区360全景方案
佳兴伟诚特种车 360 全景环视驾驶辅助系统,为特种作业提供安全保障。乌兰察布装载车盲区360全景方案
由于运输车安全进出工房装卸产品的时经常发生碰撞。运输车辆在进出工房大门时,车辆两侧存在视觉盲区,以往依靠辅助人员提示进行作业,但因环境狭窄且环境噪音大,辅助人员视线容易受阻,导致司机难以完全掌握周围状态,存在碰撞风险。该系统主要用于保证车上产品的运输安全。特种车360驾驶辅助系统在车辆运输过程中与周围环境小于安全距离时能够自主预警(包括车辆顶部的安全距离预警),避免司机因环境状态未知而出现的碰撞事故。系统通过安装在车身周围前后左右的 4 个超广角、高清夜视摄像头,实时采集车身四周的高清视频画面,在图像处理器中经过360算法畸变矫正、图像拼接和融合等处理,终合成车身周围 360°的鸟瞰全景画面,并显示在车载显示屏上,为司机提供 360°全景驾驶辅助。乌兰察布装载车盲区360全景方案