- 品牌
- 宏智铭,升泰电气
- 型号
- 齐全
- 加工定制
- 是
电动式阀门遥控系统在船舶领域的应用,给排水系统方面
淡水供应:船舶的淡水供应系统需要保证船员和乘客的生活用水需求。电动式阀门遥控系统可以控制淡水管道上的阀门,确保淡水的正常供应和分配。例如,在船舶的厨房、卫生间等区域,船员可以通过该系统远程控制水龙头的开关,方便使用淡水。污水排放:船舶产生的生活污水和废水需要经过处理后才能排放到海洋中。电动式阀门遥控系统可以控制污水排放管道上的阀门,确保污水按照环保要求进行处理和排放,避免对海洋环境造成污染。 阀门遥控系统服务,就选无锡宏智铭科技,用户的信赖之选,有需求可以来电咨询!葫芦岛阀门遥控系统准确
电液式阀门遥控系统的多功能性与适应性
适配多种阀门类型:该系统可以与多种类型的阀门配合使用,无论是闸阀、截止阀等直线运动的阀门,还是球阀、蝶阀等旋转运动的阀门,都能通过合适的液压执行机构(如液压缸或液压马达)实现远程控制。这种多功能性使得它在不同的工业领域和工程应用中都能发挥作用。可扩展性和集成性强:电液式阀门遥控系统可以很容易地与其他工业自动化系统集成,如分布式控制系统(DCS)或监控与数据采集(SCADA)系统。同时,系统还具有可扩展性,可以根据实际需要增加阀门控制数量或功能模块。例如,在工厂的自动化升级过程中,它可以方便地融入新的自动化控制系统架构,实现整个工厂的智能化管理。 都昌阀门遥控系统哪家好无锡宏智铭科技供应实验使用阀门遥控系统,有想法的不要错过哦!
气动式阀门遥控系统的执行机构部分
反馈单元用于监测阀门的状态并将信息反馈给控制单元。常见的反馈元件有位置传感器和限位开关。位置传感器可以精确地测量阀门的开度,例如采用电位计式或者编码器式位置传感器,将阀门的开度信息转换为电信号反馈给控制单元,以便实现对阀门开度的精确控制和监控。限位开关则主要用于检测阀门是否完全开启或者完全关闭,当阀门到达极限位置时,限位开关会发出信号,通知控制单元停止对执行机构的驱动,防止阀门过度运动造成损坏
电液式阀门遥控系统的液压动力单元
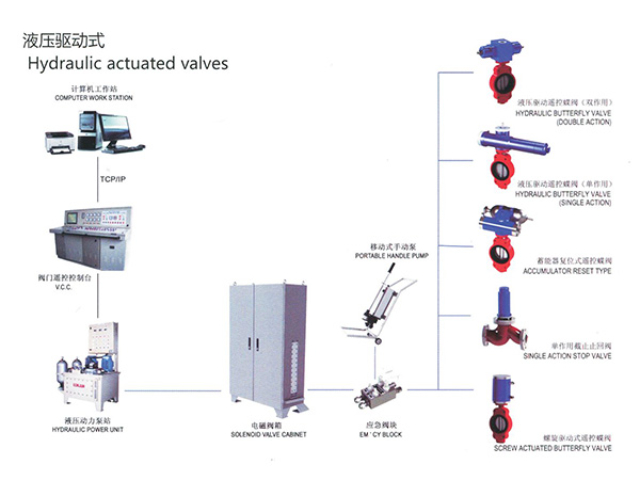
液压动力单元是系统的动力源,主要由电机、液压泵、油箱、过滤器和压力控制阀等组成。电机驱动液压泵从油箱中抽取液压油,经过滤器过滤后,液压油在压力控制阀的调节下形成具有一定压力的油流。液压泵的类型多样,如齿轮泵、叶片泵和柱塞泵,根据系统的具体需求选择合适的泵型。例如,在高压应用场景下,柱塞泵是较好的选择,因为它能够提供较高的压力。
电液式阀门遥控系统是一种结合了电气控制和液压驱动的先进阀门控制系统。它主要用于远程控制各种工业阀门,如在船舶、石油化工、电力等众多领域发挥关键作用。该系统利用电信号进行指令传输,通过液压动力来驱动阀门动作,能够精确地控制阀门的开闭程度和动作速度。 无锡宏智铭科技的阀门遥控系统物美价优,欢迎您的来电哦!
电液式阀门遥控系统的电气控制单元:
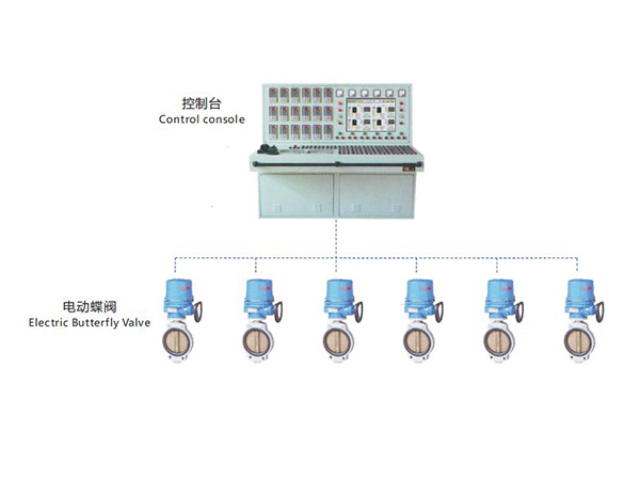
这是系统的控制重要部分,包括控制器(如可编程逻辑控制器 PLC 或分布式控制系统 DCS)、操作界面(人机接口 HMI)和信号传输模块。控制器接收来自操作人员的指令或预先设定的程序信号,经过处理后发送控制信号给液压控制单元。操作界面通常是带有显示屏和按键的控制台,方便操作人员进行手动操作、参数设置和状态查看。信号传输模块负责将控制信号以有线(如电缆)或无线(如 ZigBee、Wi - Fi 等)的方式传输到液压控制单元。 无锡宏智铭科技为您提供阀门遥控系统,有想法的可以来电咨询!合肥电动蝶阀阀门遥控系统
无锡宏智铭科技的阀门遥控系统服务,欢迎咨询了解!葫芦岛阀门遥控系统准确
船舶抗倾控制系统的应用-海上工程船舶
起重船起重船在进行海上吊装作业时,由于吊起的重物较重且位置可能偏离船舶中心,会对船舶产生较大的倾侧力矩。船舶抗倾控制系统可以根据吊起重物的重量、位置和船舶自身的状态,通过控制压载水或可移动重物来平衡倾侧力矩。例如,当起重船吊起一个大型海上平台构件并向一侧旋转时,系统会精确计算所需的抗倾措施,如向相反方向的压载水舱注水,使船舶保持稳定,防止船舶因重心偏移过大而倾覆。铺管船铺管船在铺设海底管道的过程中,管道的铺设速度、方向以及自身重量等因素都会影响船舶的平衡。抗倾控制系统能够实时监测这些因素对船舶的影响,通过调节压载水或其他抗倾设备来确保船舶的稳定性。例如,当管道向一侧铺设时,系统会自动调整船舶的重心,避免船舶倾斜,保证铺管作业的顺利进行。 葫芦岛阀门遥控系统准确

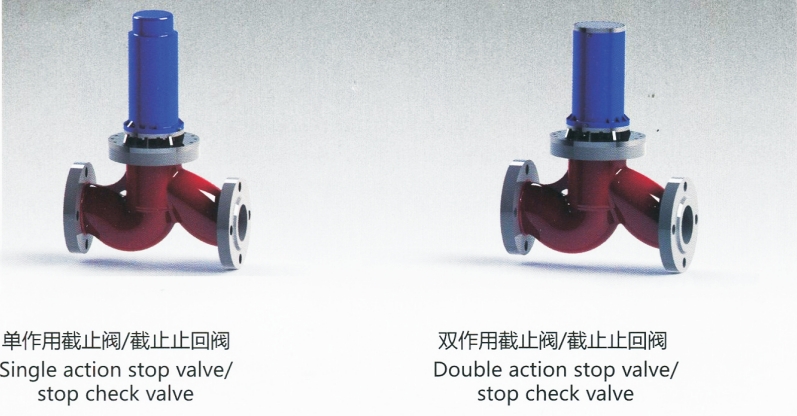
电液式阀门遥控系统的液压执行机构 主要包括液压缸和液压马达,用于将液压动力转换为阀门的机械运动。对于闸阀、截止阀等直线运动的阀门,通常采用液压缸作为执行机构。液压油进入液压缸推动活塞运动,从而带动阀门的阀杆进行开闭操作。对于球阀、蝶阀等旋转运动的阀门,则采用液压马达,液压马达在液压油的驱动下产生旋转扭矩,使阀门的阀芯旋转。 传感器单元传感器单元 用于监测阀门和液压系统的各种参数。其中,开度传感器可以精确测量阀门的开度,并将信号反馈给电气控制单元,实现闭环控制。压力传感器用于测量液压系统中的压力,确保液压油压力在安全范围内,同时也为流量控制提供数据支持。流量传感器则直接测量...
- 江门电动蝶阀阀门遥控系统 2026-04-25
- 盐城船舶抗倾倒阀门遥控系统 2026-03-27
- 广东船用阀门遥控系统 2026-03-27
- 电液式阀门遥控系统定价 2026-03-27
- 南通电动蝶阀阀门遥控系统 2026-03-27
- 厦门阀门遥控系统多少钱 2026-03-27
- 瑞昌液压式阀门遥控系统 2026-03-27
- 浙江阀门遥控系统多少钱 2026-03-27
- 盐城阀门遥控系统准确 2026-03-26
- 泉州电动蝶阀阀门遥控系统 2026-03-25
- 镇江气动式阀门遥控系统 2026-03-24
- 汕头气动式阀门遥控系统 2026-03-24
- 武汉电液式阀门遥控系统 2026-03-24
- 液压式阀门遥控系统厂家 2026-03-23
- 南昌电液式阀门遥控系统 2026-03-23
- 三门峡电液式阀门遥控系统 2026-03-23





- 长沙调频雷达雷达物位计 05-06
- 安庆船用调频雷达物位计报价 05-05
- 许昌配电板产品 05-05
- 大连RD80G05雷达物位计准确 05-05
- 天津孔板流量计 05-05
- 广东电工试验板配电板 05-05
- 唐山配电板产品 05-05
- 中山电磁流量计 05-05
- 连云港调频雷达物位计 05-05
- 深圳配电板多少钱 05-05