- 品牌
- 宏智铭,升泰电气
- 型号
- 齐全
- 类型
- 报警装置,舵角指示器,音响信号器,转速表,传令钟
- 加工定制
- 是
自动操舵仪的操作模式:
自动操舵模式在这种模式下,自动操舵仪完全依靠上述的反馈控制原理进行操作。船舶按照预设的目标航向自动航行,自动操舵仪不断监测和调整舵角,以应对风浪、水流等外界干扰因素,确保船舶始终保持在目标航向上。随动操舵模式随动操舵模式下,舵角的转动与操舵轮的转动是同步的。船员通过转动操舵轮来控制舵角,自动操舵仪会根据操舵轮的指令驱动舵机系统转动舵叶。这种模式适用于需要船员手动干预但又希望借助自动操舵仪的精确控制功能的情况。手动操舵模式手动操舵模式完全由船员通过直接操作舵轮来控制舵角,不依赖自动操舵仪的控制功能。这种模式通常在进出港口、靠离码头等需要精确手动操作的情况下使用。应急电源操舵模式当主电源出现故障时,自动操舵仪可以切换到应急电源操舵模式。在这种模式下,利用备用电源(如 DC24V)来维持舵机系统的基本操作,确保船舶在紧急情况下仍能进行有限的操舵控制,保障船舶的安全。 无锡宏智铭科技致力于提供船用配电设备服务,有想法的不要错过哦!泉州船用配电怎么做

如何根据船舶的用电需求选择合适的主发电机容量?需要考虑计算船舶的总用电负荷
计算单个设备的实际运行功率
根据设备的额定功率和使用系数,计算单个设备的实际运行功率,公式为 P 实 = P 额 ×K 使(其中 P 实为实际运行功率,P 额为额定功率,K 使为使用系数)。例如,一台额定功率为 10kW 的通风机,使用系数为 0.7,则其实际运行功率为 7kW。
计算总用电负荷
将所有用电设备的实际运行功率相加,并考虑同时系数,得到船舶的总用电负荷,公式为 P 总 = Σ(P 实)×K 同(其中 P 总为总用电负荷,Σ(P 实) 为所有设备实际运行功率之和,K 同为同时系数)。例如,经过计算所有设备实际运行功率之和为 500kW,同时系数为 0.8,则船舶的总用电负荷为 400kW。 泰州船用配电产品船用配电设备品质可靠,欢迎咨询无锡宏智铭科技了解!
岸电装载系统工作原理:
当船舶靠岸后,船员将岸电接插件连接到岸上的电源插座上。然后,通过电缆管理系统将岸电电缆正确铺设,使岸电能够传输到船舶上。接着,变压器和变流器根据船舶电气系统的参数要求,对上岸电进行电压和频率等的转换。监测与控制系统开始工作,实时监测岸电参数,在确保一切正常的情况下,将岸电接入船舶的主配电板,然后分配到船舶的各个用电设备,满足船舶的电力需求。
岸电箱装载系统是用于舰船停泊码头或船坞岸电向舰船供电系统,岸电装载系统包含:岸电箱,岸电测量箱,岸电绞车,岸电电缆,岸电插头,本系列岸电系统适用于直流 220V 以下,交流 AC380V/50HZAC440V/60HZ,岸电电源。防护等级一般为 IP56。
船用配电系统常见的过载问题
原因:船舶用电设备的增加是导致过载的一个因素。例如,在船舶改装或增加新设备后,原有的配电系统容量没有相应升级,当多个设备同时运行时,就容易出现过载情况。设备故障也可能引发过载。例如,电机轴承损坏导致电机堵转,其电流会急剧上升,造成过载。另外,某些设备的启动电流过大,如果频繁启动,也会使配电系统承受过载电流。船员误操作也是过载的一个原因。例如,同时开启过多的大功率设备,或者在设备运行过程中错误地调节了设备的运行参数,导致设备功率超出正常范围。后果:长时间的过载会使电气设备过热,加速设备的老化和损坏。对于电缆而言,过载电流会使其温度升高,降低电缆的使用寿命,甚至可能引发绝缘层燃烧,造成火灾隐患。同时,过载还可能导致保护装置频繁动作,影响船舶用电设备的正常运行。 无锡宏智铭科技可供应电动船用配电设备。

自动操舵仪的缺点:
依赖电子设备和电力
电子设备故障风险:自动操舵仪高度依赖电子元件和复杂的电子系统。在海洋环境中,电子设备容易受到潮湿、盐雾、电磁干扰等因素的影响,导致设备故障。一旦电子元件出现故障,可能会影响自动操舵仪的正常工作,进而影响船舶的航行安全。电力供应要求高:其正常运行需要稳定的电力供应。如果船舶的电力系统出现故障,如发电机故障或供电线路损坏,自动操舵仪可能无法工作。
初始成本和维护成本高
购买成本高:自动操舵仪是一种较为复杂的船舶设备,其研发、生产涉及到高精度的电子技术和复杂的机械结构,导致其购买成本较高。维护成本高:其维护需要专业的技术人员和专门的测试设备。电子元件的维修和更换往往需要较高的费用,而且定期的校准和检测也增加了维护成本。
可能存在操作复杂性
船员培训要求高:船员需要经过专门的培训才能熟练操作自动操舵仪。不同的操作模式和功能设置需要船员掌握一定的电子技术和操作规范,应急处理复杂:在自动操舵仪出现故障或异常情况时,需要船员快速切换到其他操舵模式(如手动操舵)进行应急处理。 无锡宏智铭科技是一家专业提供船用配电设备服务的公司,欢迎新老客户来电!中山船用配电配件
船用配电设备服务,就选无锡宏智铭科技,让您满意,欢迎新老客户来电!泉州船用配电怎么做
自动操舵仪的重要操作原理是基于反馈控制理论。其主要目的是通过不断监测船舶的实际航向,并与设定的目标航向进行比较,然后根据偏差来调整舵角,使船舶保持在预定航向上。
主要组成部分及其原理
传感器
电罗经和磁罗经:电罗经和磁罗经用于测量船舶的实际航向。电罗经通过测量地球自转角速度和重力加速度来确定船舶的真方位,精度较高;磁罗经则是利用地球磁场来指示方向。这些罗经所测得的航向数据会被传送给自动操舵仪的控制单元。GPS(全球定位系统):GPS用于确定船舶的地理位置。通过连续获取船舶的位置信息,自动操舵仪可以计算出船舶的实际航向,并与目标航向进行对比。GPS信号提供了较为精确的位置和速度信息,有助于提高自动操舵的精度。
控制单元:信号处理与比较、舵角计算
执行机构
舵机系统:计算得出的舵角指令会被传送给舵机系统。舵机系统根据指令驱动舵叶转动相应的角度。例如,如果船舶的实际航向偏左,控制单元计算出需要向右转动一定角度的舵角,舵机系统就会将舵叶向右转动,使船舶向右转向,从而纠正航向偏差。 泉州船用配电怎么做
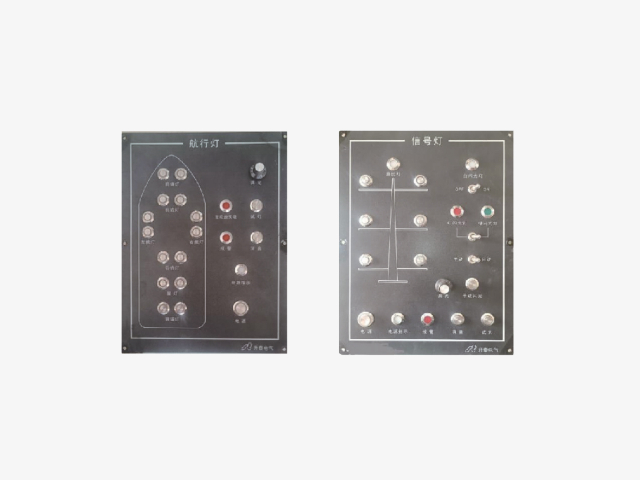
航行信号灯控制箱安装与维护要求: 安装位置 航行信号灯控制箱通常安装在船舶驾驶室或紧邻驾驶室的位置,这样便于船员操作和观察。它应该安装在干燥、通风良好的地方,避免受到海水、雨水和潮湿空气的侵蚀。同时,安装位置要考虑到方便与船舶的电气系统进行连接,减少线路长度,降低线路损耗和故障概率。 日常维护 定期检查控制箱的外观,查看是否有损坏、变形或腐蚀的情况。清洁控制箱表面的灰尘和杂物,保证散热良好。检查控制面板上的按钮和旋钮是否灵活可靠,如有卡滞现象应及时修复或更换。定期测试各个信号灯的功能,包括开启、关闭、亮度调节和信号切换等操作。同时,检查故障检测和报警功能是否正常,确...
- 苏州船用配电厂家 2026-03-28
- 宜昌船用配电有哪些厂家 2026-03-28
- 长沙船用配电系统调试 2026-03-28
- 恩施船用配电包含哪些设备 2026-03-28
- 温州船用配电厂家 2026-03-28
- 东营船用配电设备维修 2026-03-28
- 日照船用配电配件 2026-03-27
- 深圳船用配电设备维修 2026-03-27
- 北海船用配电设备 2026-03-27
- 东营船用配电有哪些厂家 2026-03-27


- 营口船用配电怎么做 2026-03-26
- 长沙船用配电设备维修 2026-03-26
- 株洲船用配电厂家 2026-03-25
- 荆州船用配电设备 2026-03-25
- 天津船用配电设备维修 2026-03-25
- 秦皇岛船用配电怎么做 2026-03-25





