-
 04 01
04 01 -
 04 01
04 01 -
 04 01定制点胶机器人价格实惠
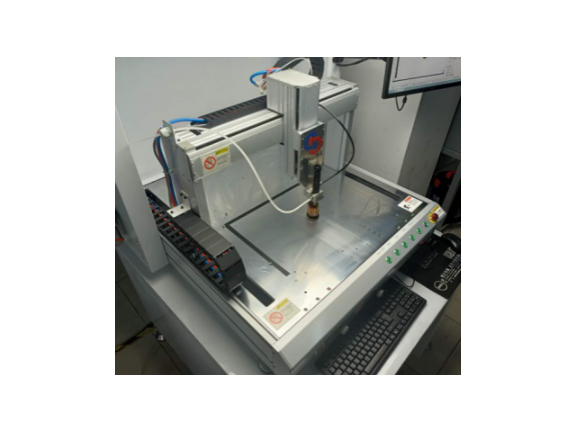
04 01定制点胶机器人价格实惠在一些对空间要求较为严格的生产环境中,小体积点胶机器人展现出了独特的优势。它的紧凑设计使得它能够在有限的空间内灵活安装和操作,不会占用过多的生产场地。例如,在一些小型的电子实验室或研发车间,空间往往比较有限,传统的点胶设备可能无法满足安装要求,而小体积点胶机器人则可以轻松地放置在工作台上,完成各种点胶任务。而且,小体积点胶机器人虽然体积小... 【查看详情】
-
 03 01金华点胶机器人尚纳智能
03 01金华点胶机器人尚纳智能双平台点胶机器人通过设置两个独自的工作平台,实现了生产效率的大幅提升。在一个平台进行点胶作业的同时,另一个平台可以进行产品的装卸和准备工作,两个平台交替运行,缩短了生产周期。在LED灯具制造行业,双平台点胶机器人可以同时对两个LED灯板进行点胶操作。当一个灯板完成点胶后,机械臂可以迅速切换到另一个灯板继续工作,而操作人员可以在此时将已点胶... 【查看详情】
-
03 01流水线加工点胶机器人诚信经营
智能点胶机器人表示了点胶机器人技术的新发展方向。它融合了人工智能、机器视觉、传感器等多种先进技术,实现了点胶过程的智能化和自动化。通过机器视觉系统,智能点胶机器人可以实时识别产品的位置、形状和尺寸,自动调整点胶轨迹和参数,无需人工干预。例如,在电子产品的组装线上,由于产品的尺寸较小且形状复杂,传统的点胶方式很难保证点胶的准确性。而智能点胶... 【查看详情】
-
 03 01新能源蜡镶机器人订制价格
03 01新能源蜡镶机器人订制价格蜡镶机器人不只在珠宝、饰品加工领域有着普遍应用,还在工业设计领域展现出了一定的拓展潜力。在工业产品设计中,一些产品需要镶嵌一些装饰性或功能性的元件,如电子产品的外壳上镶嵌标识、装饰件等。蜡镶机器人可以通过精确的控制和灵活的操作,实现这些元件的快速、准确镶嵌。与传统的镶嵌方法相比,蜡镶机器人能够提高镶嵌的精度和质量,减少人工操作的误差和瑕疵... 【查看详情】
-
 03 01
03 01 -
 03 01
03 01 -
 03 01新能源点钻机器人成交价
03 01新能源点钻机器人成交价在需要胶水固定的点钻场景中,智能立体点胶点钻机器人通过工艺整合简化了生产流程。其机械臂末端集成了点胶阀与点钻头,可根据程序自动切换工具:先在基材上涂抹定量胶水,再精确放置钻饰,然后通过轻微按压确保粘合牢固。该设备的点胶系统采用气压控制技术,能根据钻饰大小调整胶水出量,避免溢胶或胶量不足。例如,在加工发夹时,机器人可在0.5秒内完成单个钻饰... 【查看详情】
-
 03 01白云区点胶机器人价目表
03 01白云区点胶机器人价目表小体积点胶机器人以其小巧灵活的特点,在空间有限的生产环境中具有独特的优势。在一些小型电子产品的制造车间,工作空间往往比较狭窄,大型的点胶机器人难以施展。而小体积点胶机器人可以轻松地放置在有限的空间内,完成点胶任务。它具有紧凑的机械结构和轻便的机身,便于移动和安装。同时,小体积点胶机器人并不意味着性能的妥协,它同样具备精确的点胶能力和稳定的... 【查看详情】
-
 03 01小体积蜡镶机器人诚信经营
03 01小体积蜡镶机器人诚信经营视觉蜡镶机器人的图像处理技术是其实现精确蜡镶的关键。在蜡镶过程中,视觉系统采集到的图像可能存在噪声、模糊等问题,影响视觉识别的准确性。因此,需要采用先进的图像处理技术对采集到的图像进行预处理。例如,通过滤波算法去除图像中的噪声,使图像更加清晰;采用边缘检测算法提取工件的轮廓信息,确定蜡镶的位置。同时,视觉系统还需要对图像进行特征提取和匹配... 【查看详情】
-
 03 01智能点胶机器人口碑推荐
03 01智能点胶机器人口碑推荐小型点胶机器人以其便捷的操作方式受到了许多小型企业和实验室的青睐。它通常具有简单易懂的操作界面和人性化的设计,即使是没有专业技术的操作人员也能够快速上手。小型点胶机器人的安装和调试过程相对简单,不需要复杂的设备和场地条件。在一些科研实验室中,研究人员可以根据实验需求,随时调整小型点胶机器人的点胶参数和运动轨迹,进行各种点胶实验。例如,在生... 【查看详情】